【集群机器人】《考虑敌手的多智能体系统协同任务分配与运动规划》2022最新226页博士论文,密歇根大学
研究动机

贡献与提纲
-
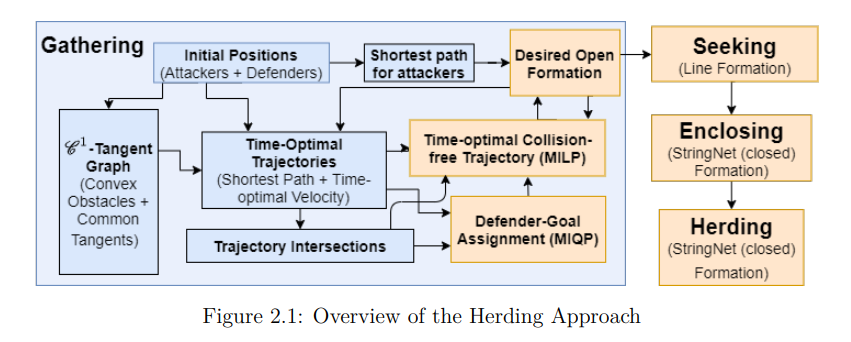
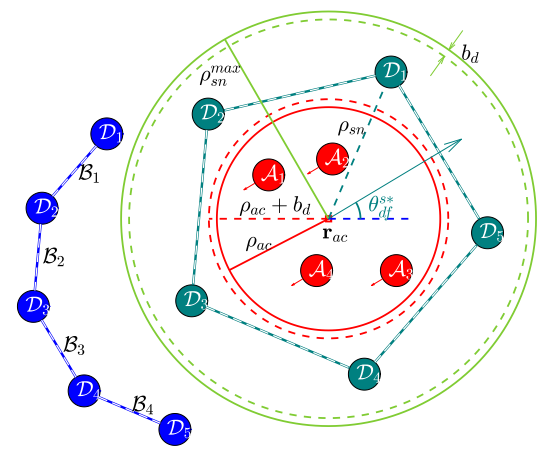
在第2章中,开发了一种被称为 "StringNet Herding "的放牧方法,即在规避风险的攻击者群周围形成一个被称为 "StringNet "的封闭防御队形(见图1.5),使其运动被限制在StringNet的内部,然后将对抗者群放牧到一个安全区域,以保护障碍物密集环境中的一个保护区。与早期的文献相比,本章的贡献在于。i) 一种运动规划策略,该策略结合了近乎时间最优的运动规划和状态反馈,在阻尼双积分器动力学下运动的防御者的有限时间收敛、有界控制律,以完成对攻击者的驱赶,同时避开凸形多边形障碍物,该策略的实验证明,以及对设计的控制律的收敛时间的明确保证。ii)一组条件,在这些条件下,防御者能够在攻击者到达聚集地点之前,聚集在即将到来的攻击者通往保护区的最短路径上,然后将所有攻击者赶到安全区域。本章的结果是基于[99,100]中的工作。
-
在第3章中,第2章开发的 "StringNet Herding"方法被扩展到这样的场景:攻击者的蜂群可能会分裂成更小的蜂群,以应对防卫者的到来。特别是,使用混合整数规划(MIP)开发了集中和分散的合作算法,以分组和分配防御者将识别的不同攻击者群赶到最近的安全区域。还开发了一种受几何学启发的启发式算法,以获得对MIPs的次优但更快的分配方案。本章的结果是基于[101, 102]的工作。 -
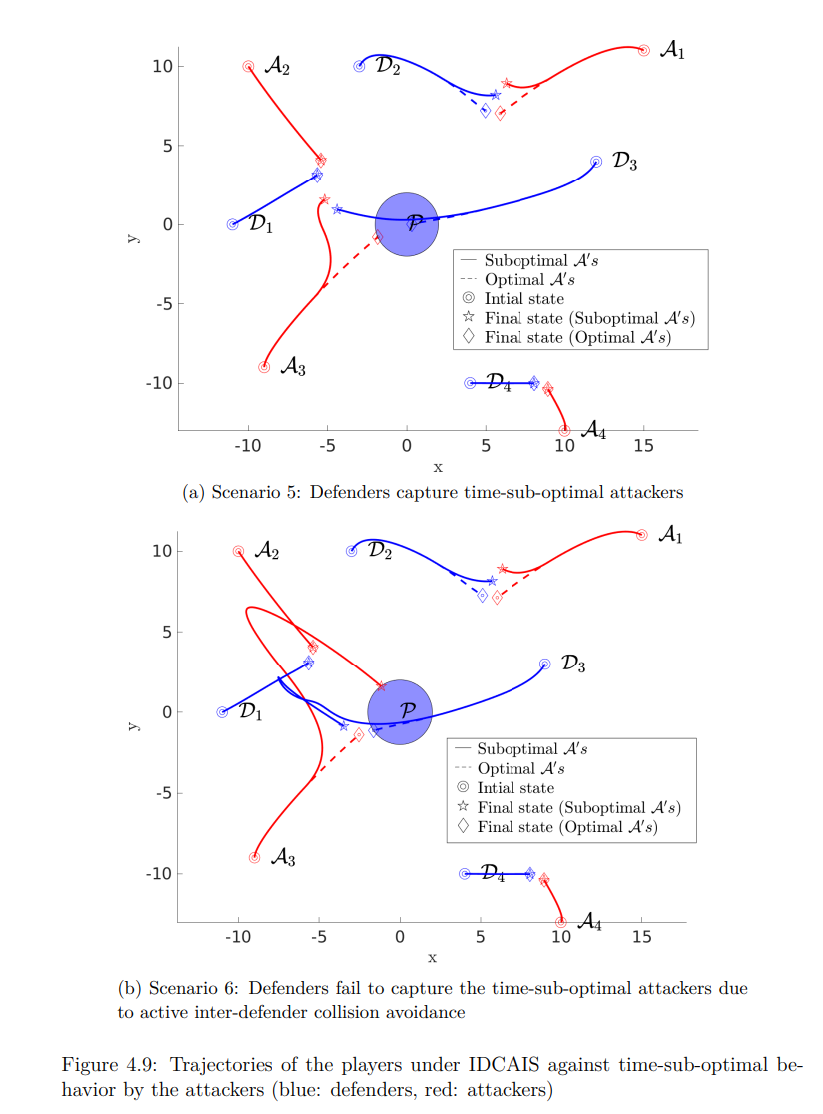
在第4章中,为一组防守者开发了一种防守者之间的碰撞感知拦截策略(IDCAIS),以尽快拦截尽可能多的冒险攻击者,同时确保防守者之间不发生碰撞。特别是,首先解决了防守者和攻击者之间的非零和博弈,以获得一个时间最优的防御策略,所有的防守者和攻击者对。然后开发一个混合整数二次规划(MIQP)来寻找碰撞感知的防御者-攻击者分配(CADAA),以便尽可能多地和尽可能快地捕获攻击者,同时防止或推迟防御者之间的碰撞。本章的结果目前正在审查中[103]。 -
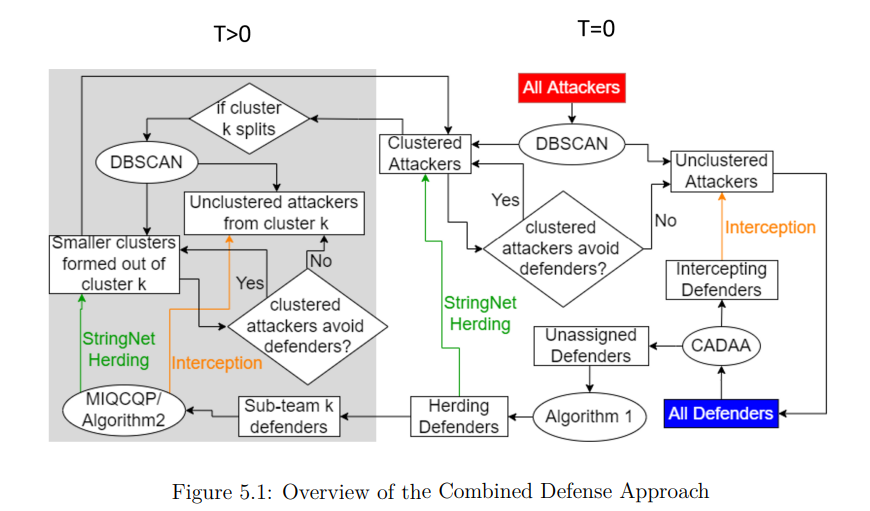
在第5章中,第2-3章开发的 "StringNet Herding"策略和第4章开发的碰撞感知拦截策略IDCAIS被结合在一起,以同时处理规避风险和冒险的攻击者。特别是,使用MIPs和基于几何学的启发式方法开发了几种算法,以分组和分配防御者团队或单个防御者来驱赶风险规避型攻击者群,或拦截风险规避型攻击者,以应对攻击者分裂成更小的群组来躲避防御者或一些风险规避型攻击者的高速机动以最大限度地破坏保护区域。本章的结果目前正在审查中[104]。 -
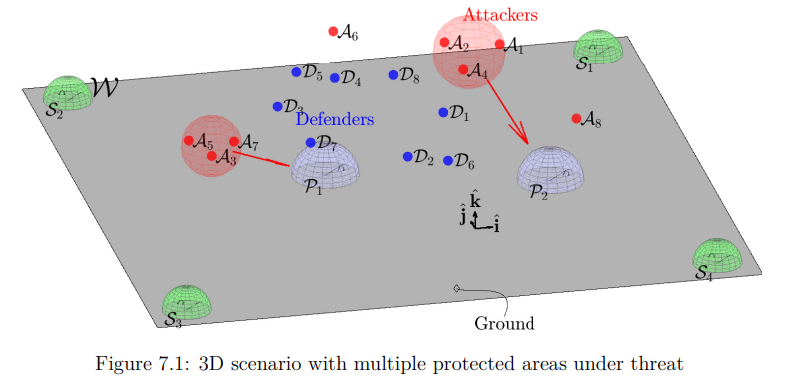
在第6章中,"StringNet Herding"策略被扩展到三维环境中。特别是,为'StringNet Herding'策略的不同阶段设计了三种三维防御队形,对第2章中设计的控制法则进行了适当的修改以适应三维环境,然后提供了玩家初始状态的条件,在这些条件下,保证防御者在攻击者到达保护区前聚集在攻击者最短路径上的某个位置。本章的结果是基于我们在[105]的合作工作。
便捷下载,请关注专知人工智能公众号(点击上方关注)
点击“发消息” 回复 “HERD” 就可以获取《【集群机器人】《考虑敌手的多智能体系统协同任务分配与运动规划》2022最新226页博士论文,密歇根大学》专知下载链接



登录查看更多
相关内容
Arxiv
0+阅读 · 2023年1月22日
Arxiv
0+阅读 · 2023年1月20日

相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2023年1月22日
Arxiv
0+阅读 · 2023年1月20日