
自主机器人团队组成中的异质性什么时候是有益的,什么时候是有害的?我们在一个最小可行的模型中研究并回答了这个问题,该模型研究了异质速度在周界防御问题中的作用,其中防御者共享一个总的速度分配预案。我们考虑了两种不同的问题背景,并制定了基于动态规划和局部互动规则的策略。我们对这两种方法进行了理论分析,并使用模拟方法对我们的结果进行了广泛的验证。有趣的是,我们的结果表明,异质团队的生存能力取决于防御者可用的信息量。此外,我们的结果表明了一个普遍性属性:在广泛的问题参数范围内,防守方的最佳速度比率几乎保持不变。
关键词:周界防御,异质多机器人团队,动态规划
引言
机器人系统的一项日益重要的任务是保卫一个地区免受外部因素的影响,这些因素构成了不同程度的威胁。这方面的例子包括保卫机场,防止无人机入侵[6],保卫野生动物栖息地,防止偷猎者侵入[1],扑灭和防止人类或自然活动造成的破坏性野火蔓延[8],以及军事应用[13]。
一般来说,周界防御问题的解决方案是为一组限制在某一区域周界的智能体寻找策略,这些智能体受托保卫该区域不受试图突破该区域周界的入侵者侵害[16]。
与同质化的机器人团队相比,具有不同能力的机器人团队(异质化团队)有其独特的优势和挑战。为不同的智能体配备不同的能力可以形成协同效应,在这种情况下,异质系统胜过由相同智能体组成的同质系统。因此,在过去十年中,机器人界对定义、探索和量化不同机器人应用中的异质性产生了极大的兴趣[19,14,11,7,12,10]。
本文研究了多机器人团队中异质性对周界防御问题的影响。我们提出了两种最优策略,在不同的假设条件下有效。第一个策略是基于动态规划(DP)[2]。当防御者能够预测来袭攻击的位置时,它是最优的,但受到维度诅咒的影响,因此相关计算成本相对较高。第二种策略是基于局部互动规则的,当防御者没有关于来袭攻击的信息时是最佳的。这种策略可以以在线方式高效计算,但没有提供对攻击位置的任何先验知识。
我们证明了两种策略的最优性并分析了它们的时间复杂性。这些算法在模拟中得到了广泛的验证。我们的数值实验是二维的,但大多数理论结果对任何维度都有效。这包括无人机应用中的三维周界,以及作为任意维度状态空间中约束集产生的更高维度的周界。
我们的结果表明,异质性在防守方能够获得有关来袭攻击信息的情况下是有益的,而在防守方没有攻击信息的情况下是有害的。此外,我们显示了一个普遍性的属性,即在两个防御者的情况下,防御者的最佳速度比率几乎保持不变。
相关工作:周界防御问题是追击-规避问题的一个变体,在文献中已经被广泛地研究。Issacs的开创性工作描述了微分博弈的方法,以得出一个追求者一个规避者博弈的均衡策略[4]。不同研究人员为解决涉及多个追击者和规避者的追击规避博弈各种变体做了大量的工作[20,21,3]。这些论文包含了从追击者方面、从规避者方面或两者来看待追击-逃避博弈的工作。维度的诅咒对解决涉及多个追击者和规避者的问题构成了相当大的挑战。本文提出的周界防御问题是Isaacs[4]首次提出的目标守卫问题的一个变体。在目标守卫问题的设定中,一个智能体的任务是对抗一个敌对智能体以守卫一个目标区域。对周界防御问题的研究还处于初级阶段。Shishika和Kumar的综述文章[16]描述了最近关于多机器人周界防御问题的工作[15,5,18,17]。与这些工作中考虑的问题不同,我们考虑的是一类周界防御问题,其中攻击者的数量远远大于防御者的数量。
本文的其余部分组织如下。第2节包含了我们的符号和问题陈述。第3节和第4节分别详细介绍了我们在非限定和单位时间范围内的理论结果。第5节讨论了模拟结果。
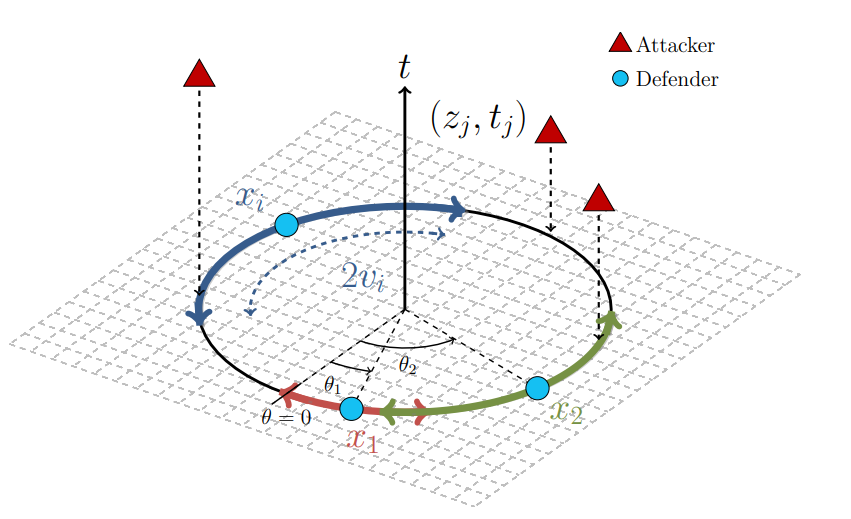
图1:三个防守者面对三个攻击者,每个防守者的单位时间可达集显示。请注意,第三个维度是时间;如果攻击代表一个物理物体,它是从圆圈外的某个地方接近的,但我们只关心它将在哪里和什么时候击中周界。在这个例子中,防守者不允许离开周界,所以可达集的大小随着速度的增加而线性增加(直到它覆盖整个周界)。


