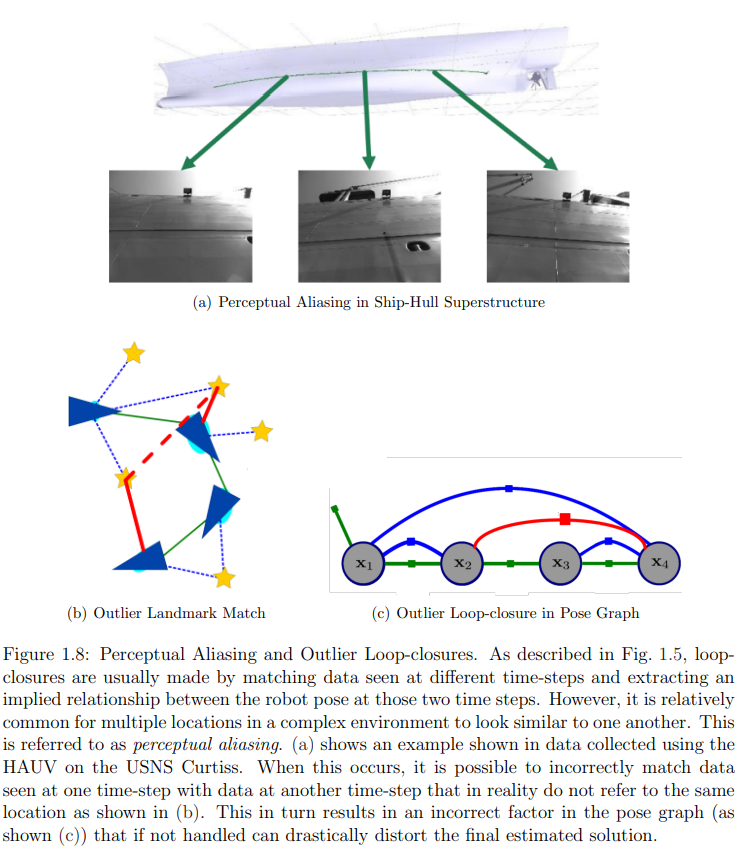
自主机器人系统的团队有可能对我们的社会产生巨大的积极影响。特别是在水下领域,协作的多智能体自主系统有可能导致效率、安全和数据质量的显著提高。然而,虽然自主系统在结构化环境中已被广泛接受,如制造厂和配送设施,但它们在非结构化环境中还没有被广泛采用。其主要原因是,自主系统在非结构化环境中的可靠性尚未达到广泛采用此类平台的成本和时间效益。自主系统可靠性的一个关键因素是导航和定位算法对常见故障情况的鲁棒性,如离群测量、糟糕的初始化和不准确的不确定性特征。因此,本论文提出了同步定位和测绘(SLAM)、多Agent地图合并、轨迹对齐和不确定性表征的方法,试图解决其中一些故障情况。
首先,我们提出了一种稳健的地图合并算法,该算法采用两个姿势图和它们之间的一组潜在的环形闭合,并选择一组可用于持续对齐和合并两个地图的这些潜在的环形闭合。我们提出的算法不需要对准的初始估计,可以处理90%以上的离群率。我们利用现有的最大剪裁算法来提高效率,并表明我们的算法优于现有的最先进的方法。
第二,我们提出了一种算法,用于将查询轨迹定位到参考轨迹上,该算法完全基于描述机器人智能体在其访问的每个位置周围环境的低维数据。我们的方法利用凸松弛技术来避免初始化和数据关联的需要,使得它在高维数据不可用的情况下很有用。我们将我们提出的方法与其他现有的凸优化技术进行了比较,并表明它比其他现有的方法更好地执行了刚体转换。
第三,我们将平面姿态图SLAM和地标SLAM问题表述为多项式优化问题,并证明这两个问题的全局最优解总是可以通过解决半有限程序(SDP)找到。由于SDP是凸的,这使得我们能够保证在没有任何初始轨迹估计的情况下找到真正的最大似然估计(MLE)。
第四,我们提出了一个框架,使用特殊欧氏群的李代数对联合相关姿势的不确定性进行建模。然后,我们推导出使用该框架时姿势组成、姿势反演和相对姿势操作的一阶不确定性传播公式。我们使用模拟数据和从现有的SLAM数据集中提取的数据进行评估,结果表明我们的方法比常用的方法导致了更一致的不确定性估计。最后,我们发布了拟议方法的C++库实现。
综上所述,本论文提出了四种用于多Agent地图合并、轨迹对齐、全局最优SLAM和姿态不确定性表征的方法,旨在解决现有定位和绘图方法的一些常见故障情况。此外,我们还证明了我们提出的所有方法在与该领域的其他方法相比较时的性能。