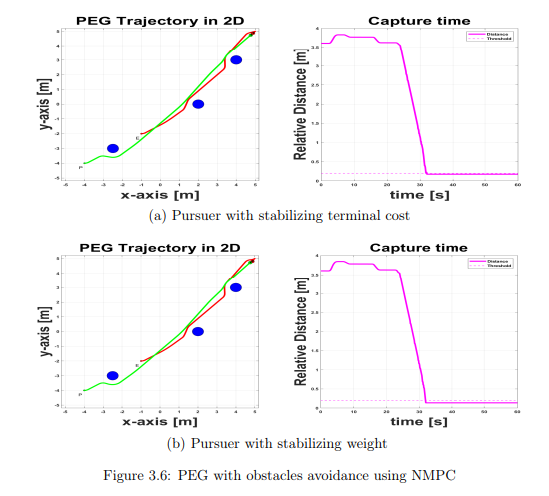
移动机器人的自主控制和导航受到了很多关注,因为机器人有能力在复杂的环境中以高精度和高效率完成复杂的任务。与移动机器人有关的经典控制问题涉及到目标导航、目标跟踪和路径跟踪,他们都有一个预先定义行为的目标。因此,控制设计没有考虑到目标的未来行为。在监视、拦截、追击-规避问题中,必须考虑到目标的未来行为。这些玩家(控制系统)与对手交战的问题最好用博弈论来解决,博弈论提供了获胜的最佳策略。然而,博弈论算法需要大量关于对手的信息来考虑对手的最优策略,从玩家的角度来看,这是最糟糕的情况。这种信息要求往往限制了博弈论在移动机器人上的应用。另外,在文献中发现的大多数作品提出的离线解决方案只适用于整体系统。这篇博士论文提出了三种不同的解决方案,以每个玩家可获得的对手信息为基础,解决非合作性博弈问题。所提出的解决方案在本质上是在线的,并能纳入避开障碍物的能力。此外,所设计的控制器首先在模拟中应用于非holonomic移动机器人,然后在类似环境中进行实验验证。在工作的第一部分,复杂环境中的点稳定问题是用非线性模型预测控制(NMPC)处理的,其中包括围绕目标位置的静态和动态避障。其次,该问题被转换为涉及具有冲突的移动目标,以形成追逐-逃避博弈。该问题采用非线性模型预测控制来解决,其中比较了两种稳定方法。NMPC方法的工作原理是,每个玩家只知道对手的当前状态。然后提出了博弈论的算法来解决同样的问题。第一种方法需要对手的所有信息,而另一种方法只需要对手的当前位置。这些方法在捕获时间、计算时间、纳入障碍物规避的能力以及对噪声和干扰的鲁棒性方面进行了比较。利用博弈论模型预测控制,提出并解决了一个位于点稳定和追逃问题的交叉点的新问题。这个问题被称为目标防御的差分博弈(DGTD),它涉及到在到达静态目标之前拦截一个移动物体。最后,所有提出的控制器都使用两个移动机器人和实验室的运动捕捉平台进行了实验验证。
Keywords: 非线性模型预测控制,博弈论,自主系统,非完整移动机器人,避障,实时实验验证。