小强,学名蟑螂,一个身形较小却能让无数猛男闻风丧胆的生物。
它常年混迹在人类无法窥探到的“隐秘角落”,偶尔的闪现势必引发一片嚎叫和追逐。
只是在这场速度的较量中,我们常常落在下风,有时眼看着它们即将命丧于自己的“无情铁脚”之下,但这只灵活的小妖精转眼间就消失不见。
虽然蟑螂很可恶,但能否把这种能力用在机器人身上呢?
最近,约翰霍普金斯大学的研究人员开发出一种腿式机器人,叫做Omni-Roach(全能小强),不仅外形形似蟑螂,还具有和蟑螂一样超强的运动能力,可以穿越复杂的三维地形,使用翅膀、尾部运动来克服颠簸,还具有自我纠正机制!
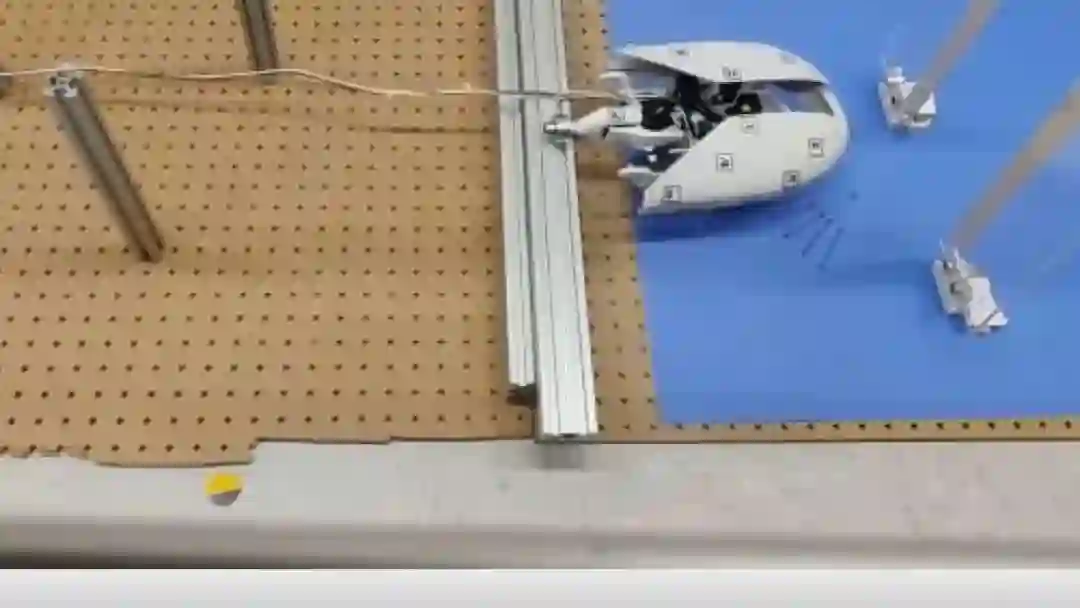
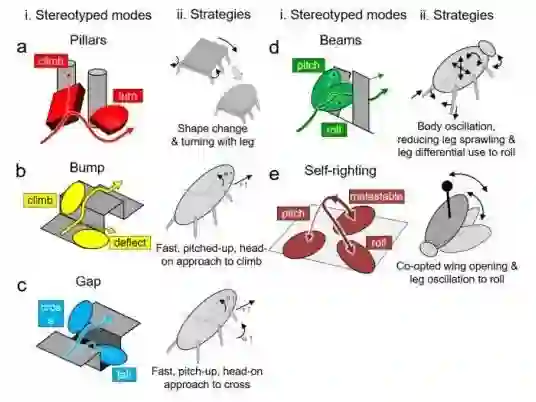
椭圆形的身体,可以帮助机器人绕过柱子,以保持所需的转弯模式:
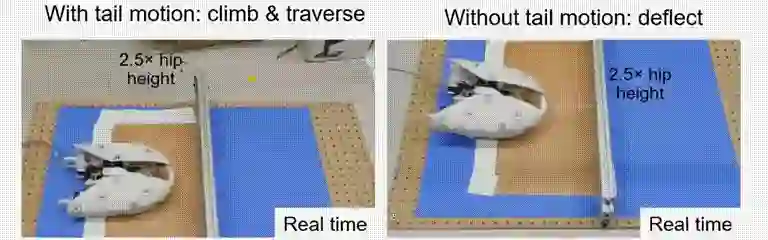
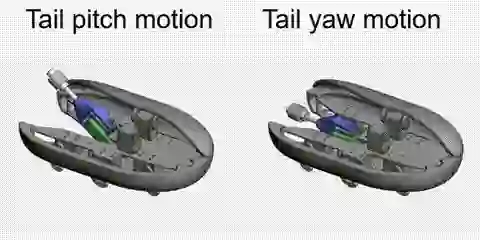
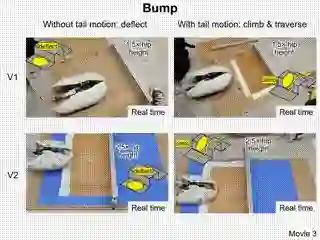
跨越大型障碍物时,具有俯仰自由度的灵活“小尾巴”可以利用惯性效应将身体向上俯仰:
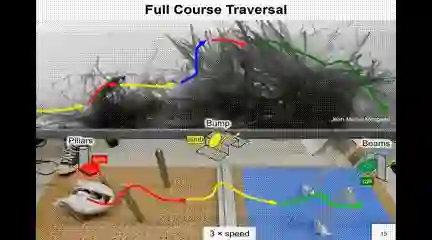
如果要通过密集杂乱的,如草丛等地形时,“全能小强”可以灵活的“滚”入缝隙,并通过大幅度的身体摆动提供动能。
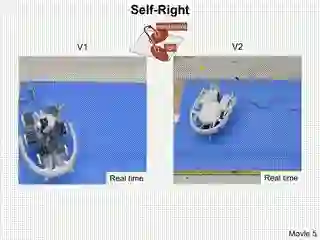
如果一不小心翻肚了怎么办?机器人具有自我纠正机制,会张开“翅膀”,并且不断地蹬腿,直到把自己翻过来:
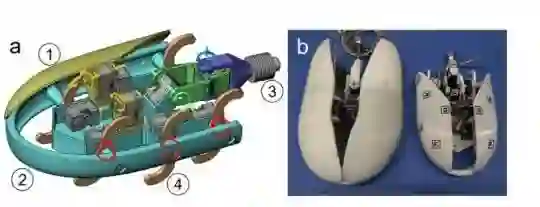
(1)一个圆形的身体,可以帮助机器人被动地偏离刚性的垂直障碍物,并滚动到缝隙中,穿过杂乱的柔性障碍物。
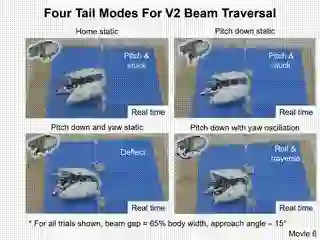
(2)具有俯仰和偏航自由度的尾巴,使身体向上倾斜,穿过大的水平障碍物,并产生身体振荡,穿越杂乱的灵活的障碍物和自我恐惧。
(3)打开顶部外壳作为翅膀的能力,圆形机身外壳分为上半部和下半部,顶部分为左右两半,每个都可以通过伺服电机滚动打开。
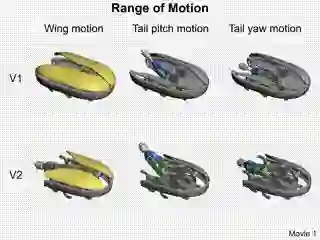
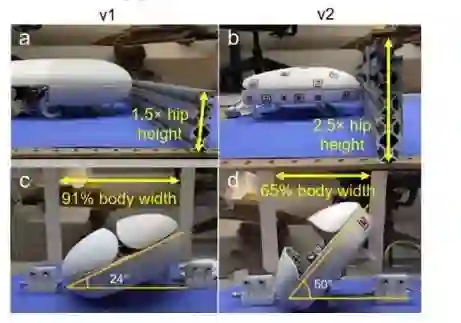
这样的“全能小强”机器人已经能够完成多种复杂三维地形和自我纠正的挑战,研究人员又进一步减小了机器人的三分之一的尺寸,重量减少了一半多,使其更加灵活。
尽管机器人的底盘更短、更扁平,但小小版“全能小强”的腿长与之前相同,相对于身体尺寸而言,腿的伸展范围更大;尾部相对于身体长度加长,以减少底盘与地面的接触。
研究人员还使用了更小、更快的伺服电机,腿也从C形变为S形,在所有实验中电机以最大速度运行。
这样一来,小小版“全能小强”可以向上倾斜以爬过2.5倍臀部高度的最大颠簸高度,且在10次测验中,成功率为80%。
在穿越缝隙时,它可以穿越13.5厘米的间隙(68%体长),而之前最好的成绩是17厘米;同时它能跑的更快,步幅频率大约是之前的三倍。
这种性能提升主要是由于改变了身体尺寸后,机器人的相对腿长(从14%到25%体长)和相对尾长(从54%到73%体长)的增加,同时也保持了腿部相对推进力。
目前,已经有很多机器人具备了多功能运动的能力,从行走、跳跃、攀爬、游泳、爬行和抓握的毫米级软机器人,到跨越空中、水上和地面运动的大型机器人。然而,如何利用身体来产生多模态运动并穿越复杂的三维地形仍然知之甚少。
这种方法使机器人能够破坏身体的稳定性,从而产生动态的运动过渡,以穿越与身体大小相当的杂乱障碍物,这显着扩展了可访问的地形,在搜索和救援以及地外探索等应用上非常有前景。
未来,研究人员计划使用更小更快的电机,并继续增加“全能蟑螂”的腿部自由度,从而产生更高的速度并进一步增加身体俯仰以跨越高障碍物;同时,研究人员打算开发算法,让机器人启用自主运动转换,并使用有关地形交互的感知信息进行反馈控制。
https://doi.org/10.48550/arXiv.2112.10614