【泡泡一分钟】一种新的立体-TOF相机系统的自标定方法(3dv-1)
每天一分钟,带你读遍机器人顶级会议文章
标题:A Novel Self-Calibration Method for a Stereo-ToF System Using a Kinect V2 and Two 4K GoPro Cameras
作者:Yuan Gao, Sandro Esquivel, Reinhard Koch,Joachim Keinert
来源:International Conference on 3D Vision
编译:袁梦 杨雨生
播音员:水蘸墨
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

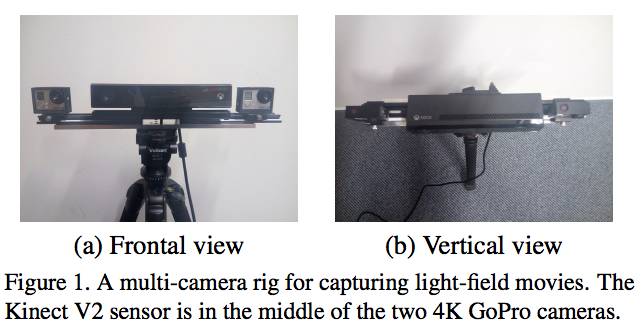
本文介绍了一种新的光场电影捕捉设备,该设备配备一个Kinect V2和两个 4K GoPro相机。
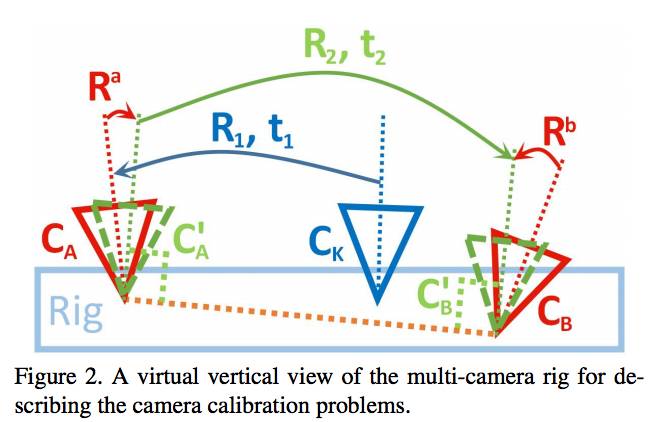
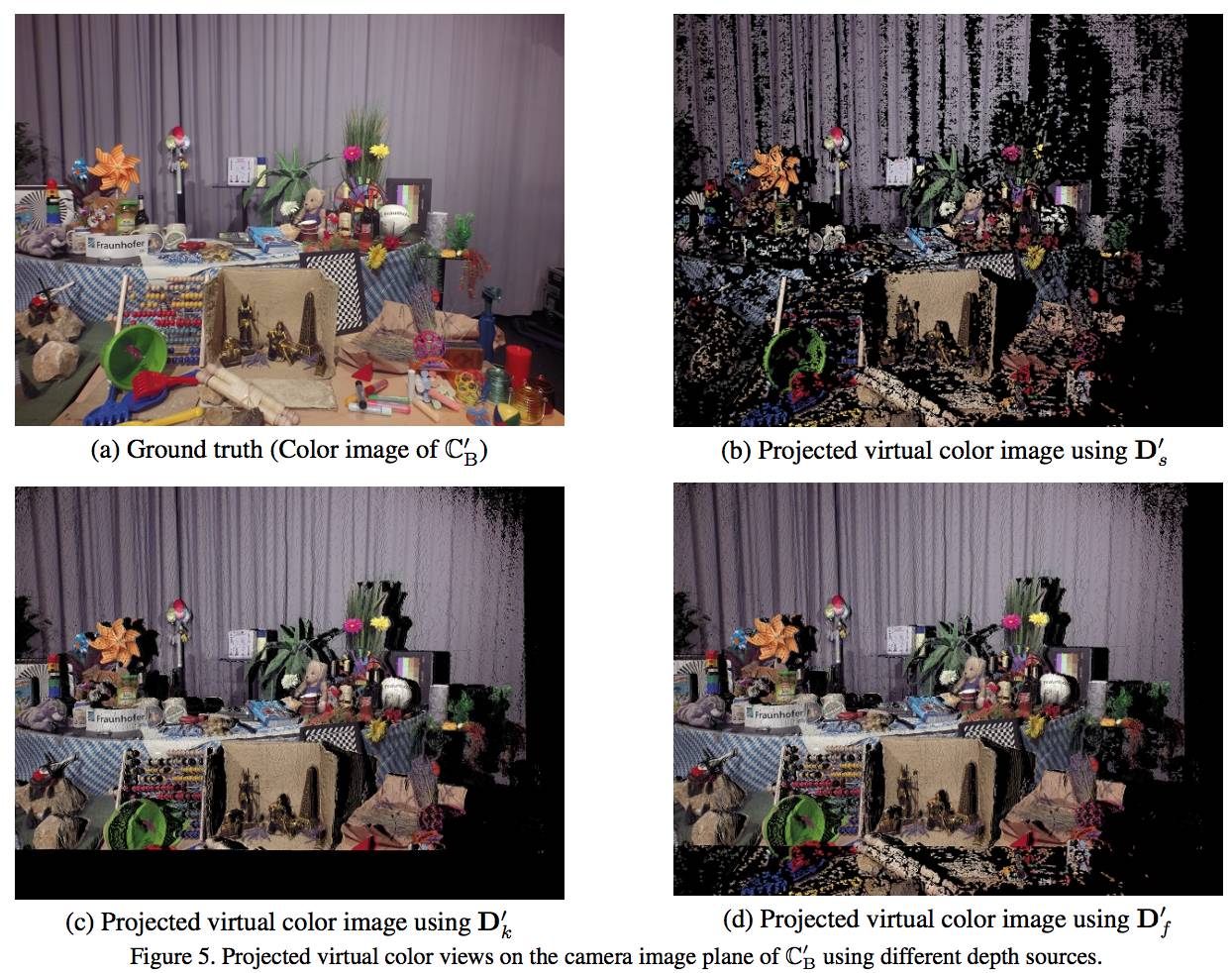
由于Kinect V2相机无法控制倾斜,很难获得立体相机系统和TOF相机系统之间恒定的刚性变换。为此,本文提出了一种基于场景和摄像机的几何约束的新的自标定方法。
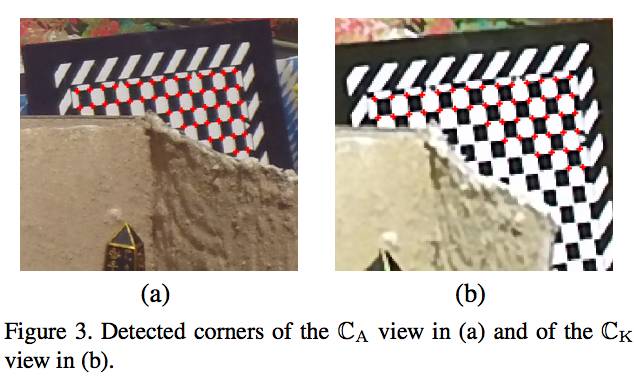
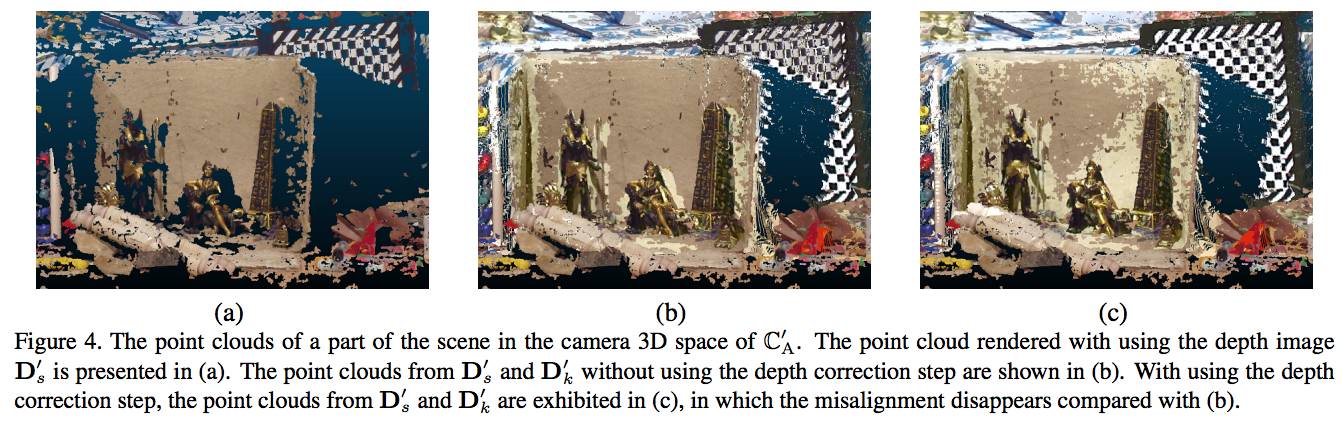
具体而言,摄像机定向近似方法,就是用通过几何约束滤波的可靠点对,来估计立体飞行系统的刚性变换,并且还利用深度校正来提高Kinect V2传感器的深度精度。
而且,本文还提出了一种立体深度数据和TOF深度数据之间进行数据融合的策略,以便在4K分辨率中提供更精确的深度图像。实验结果验证了深度校正步骤、立体-飞行时间序列系统校正方法和深度融合策略的有效性。
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
回复关键字“3dv1”,即可获取本文下载链接。

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




