【泡泡一分钟】用于街景语义分割的全分辨率残差网络(CVPR-12)
每天一分钟,带你读遍机器人顶级会议文章
标题:Full-Resolution Residual Networks for Semantic Segmentation in Street Scenes
作者:Tobias Pohlen, Alexander Hermans, Markus Mathias, Bastian Leibe
来源:CVPR 2017
编译:蔡纪源
播音员:清蒸鱼
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

今天介绍的文章是“Full-Resolution Residual Networks for SemanticSegmentation in Street Scenes”——用于街景语义分割的全分辨率残差网络,该文章发表在CVPR2017。
语义图像分割是现代自主驾驶系统的重要组成部分,因为对周围场景的准确理解对于导航和行动规划至关重要。
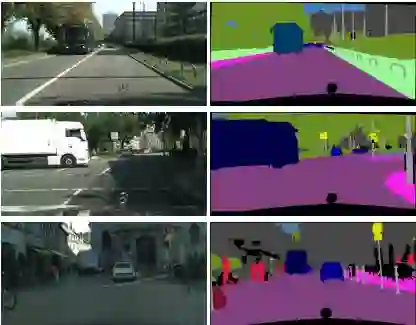
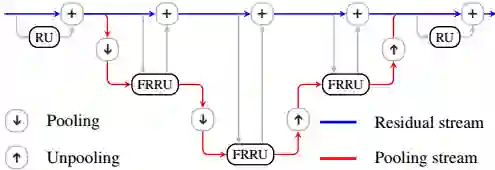
目前最先进的方法依赖于在图像分类任务中训练好的模型如,如 ResNet, VGG。尽管这些网络表现出了强大的识别性能,可以告诉我们它看见什么,但结果缺乏定位精度,不能告知目标精确位置。因此,需要额外的处理步骤来获得在原始分辨率中像素级精度的分割掩码(mask)。为了缓解这一问题,我们提出了一种新颖的类ResNet网络的架构,展现了优异的定位和识别性能。在我们的网络中使用了两个处理流来联合像素级精度的多尺度上下文信息:一个流(蓝线)保持原始分辨率来传递信息,从而保证好的定位能力;另一个流(红线)经过一系列的池化操作可以获得用于识别任务的鲁棒特征。两个流在原始分辨率图像下用残差进行耦合。
我们的方法无需额外处理步骤及预训练,在Cityscapes数据集上的结果达到了71.8%的交叠率,很不错哦。
给作者点个赞,因为公开了源码哈,链接: https://github.com/TobyPDE/FRRN
最后,借花献佛,推荐一个图像语义分割的知乎专栏,链接为https://zhuanlan.zhihu.com/semantic-segmentation。其对本文也做了简评,链接为https://zhuanlan.zhihu.com/p/27722435。
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
回复关键字“FRRN”,即可获取本文下载链接。

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





