【泡泡一分钟】Trifo-VIO:使用点和线的稳健且高效的双目视觉惯导里程计
每天一分钟,带你读遍机器人顶级会议文章
标题:Trifo-VIO: Robust and Efficient Stereo Visual Inertial Odometry using Points and Lines
作者:Feng Zheng, Grace Tsai, Zhe Zhang, Shaoshan Liu, Chen-Chi Chu, Hongbing Hu
来源:International Conference on Intelligent Robots and Systems (IROS 2018)
编译:张宁
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

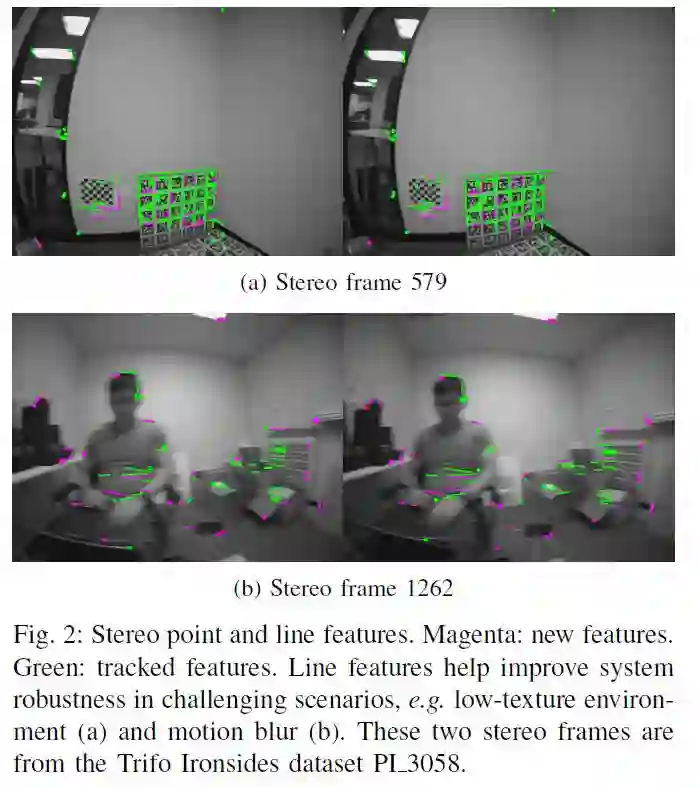
在本文中,我们介绍了我们介绍了Trifo视觉惯导里程计(Trifo-VIO),一种使用点和线的基于紧耦合滤波的双目VIO系统。当无法可靠地检测或跟踪点特征时,线特征有助于在挑战性场景中提高系统稳健性,例如,低纹理环境或照明变化。
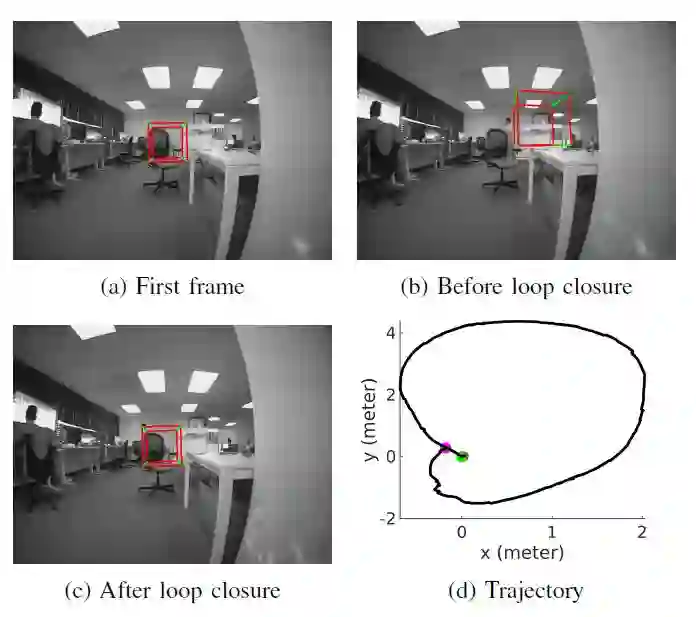
此外,我们提出了一种新颖的基于轻量级滤波的闭环技术,可以在不进行全局束调整或位姿图优化的情况下减少累积漂移。我们在EKF更新时制定回环检测,以便将过滤器维护的当前滑动窗口最佳地重新定位到过去的关键帧。
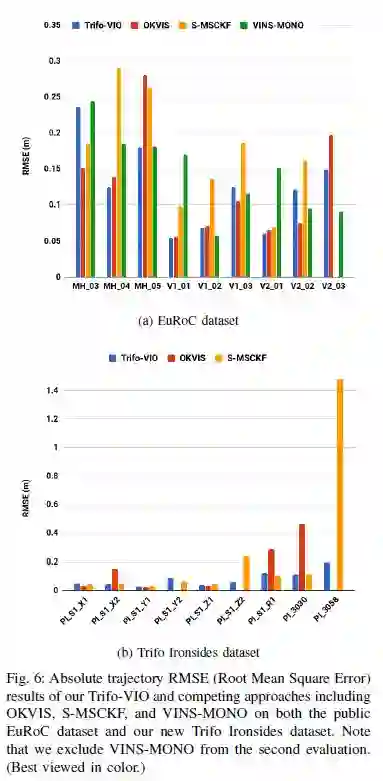
我们还提供了Trifo Ironsides数据集,这是一个新的视觉惯性数据集,具有来自Ironsides传感器[3]的高质量同步双目相机和IMU数据,具有各种运动类型和纹理以及毫米级精度的真实轨迹。为了验证所提出系统的性能,我们使用公共EuRoC数据集和Trifo Ironsides数据集对最先进的方法(OKVIS,VINS-MONO和S-MSCKF)进行了广泛的比较。
Trifo Ironsides数据集下载地址:https://github.com/TrifoRobotics/IRONSIDES/wiki/Dataset


Abstract
In this paper, we present the Trifo Visual InertialOdometry (Trifo-VIO), a tightly-coupled filtering-based stereoVIO system using both points and lines. Line features helpimprove system robustness in challenging scenarios when pointfeatures cannot be reliably detected or tracked, e.g. low-textureenvironment or lighting change. In addition, we propose a novellightweight filtering-based loop closing technique to reduceaccumulated drift without global bundle adjustment or posegraph optimization. We formulate loop closure as EKF updatesto optimally relocate the current sliding window maintainedby the filter to past keyframes. We also present the TrifoIronsides dataset, a new visual-inertial dataset, featuring highqualitysynchronized stereo camera and IMU data from theIronsides sensor [3] with various motion types and textures andmillimeter-accuracy groundtruth. To validate the performanceof the proposed system, we conduct extensive comparisonwith state-of-the-art approaches (OKVIS, VINS-MONO andS-MSCKF) using both the public EuRoC dataset and the TrifoIronsides dataset.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





