ORB-SLAM3来了!真有生之年!
点击上方“CVer”,选择加"星标"置顶
重磅干货,第一时间送达

前言
2015年,ORB-SLAM 来了!
2016年,ORB-SLAM2 来了!
时隔4年,产生了多少SLAMer...
2020年,ORB-SLAM3 来了!真有生之年!
学 SLAM 的同学,应该没有不知道 ORB-SLAM的,截止2020年7月24日,ORB-SLAM系列的谷歌引用量已达到4770 = 3053+1717!实属相当恐怖的数据
值得说一下,ORB-SLAM和ORB-SLAM2的一作都是Raúl Mur-Artal,但这位大佬应该已经毕业了,所以ORB-SLAM3由其同校应该也是同实验室的Carlos Campos完成。单看论文作者列表,猜测他们的导师都是:Juan D. Tardós
ORB-SLAM3

论文:https://arxiv.org/abs/2007.11898
代码(已开源):
https://github.com/UZ-SLAMLab/ORB_SLAM3
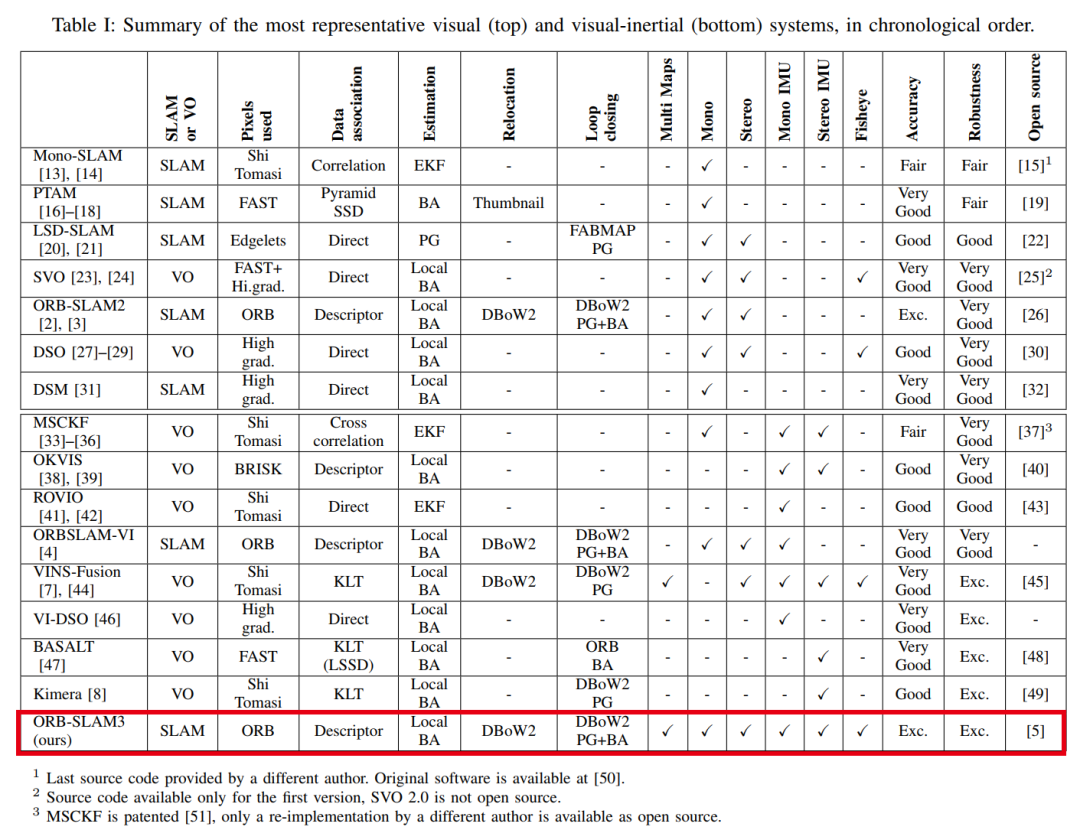
ORB-SLAM3:第一个能够使用针孔和鱼眼镜头模型,使用单目,stereo和RGB-D相机执行视觉,视觉惯性和多地图SLAM的系统。
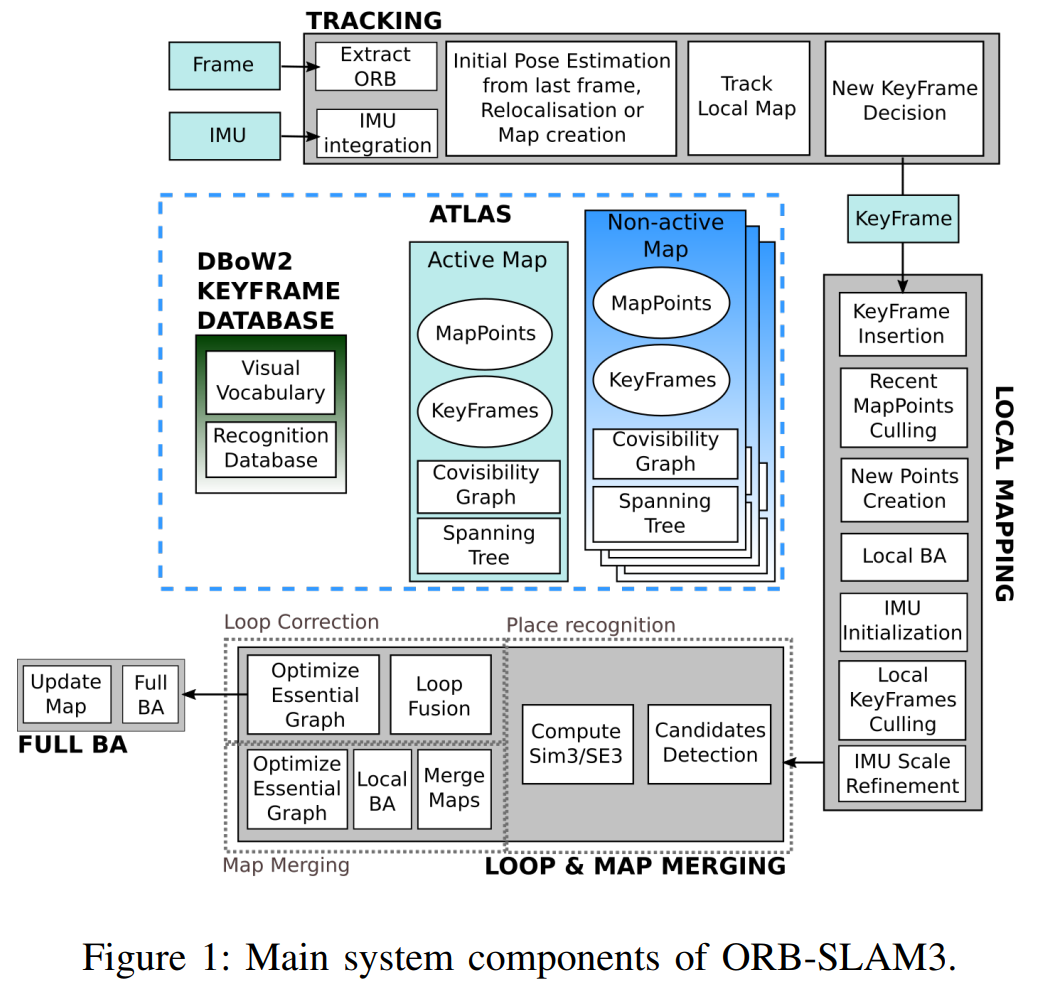
第一个创新:基于特征的紧密集成的视觉惯性SLAM系统,即使在IMU初始化阶段,该系统也完全依赖于最大后验(MAP)估计。结果是该系统可以在小空间,大空间,室内和室外环境中实时稳定运行,并且比以前的方法精确2到5倍。
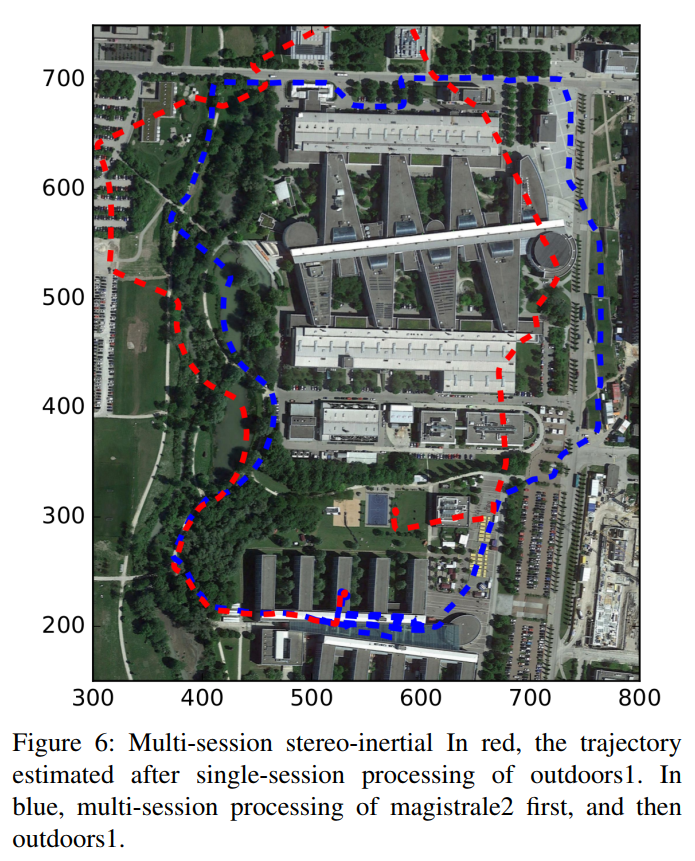
第二个创新:多地图系统(multiple map system),该系统依赖于具有改进召回率的新场景识别方法。多亏了它,ORB-SLAM3能够在很差的视觉信息中生存下来:当gets lost
时,它会启动一个新地图,当重新访问地图区域时,它将与以前的地图无缝合并。
与仅使用最后几秒钟信息的视觉里程计系统相比,ORB-SLAM3是第一个能够在所有算法阶段重用所有先前信息的系统。
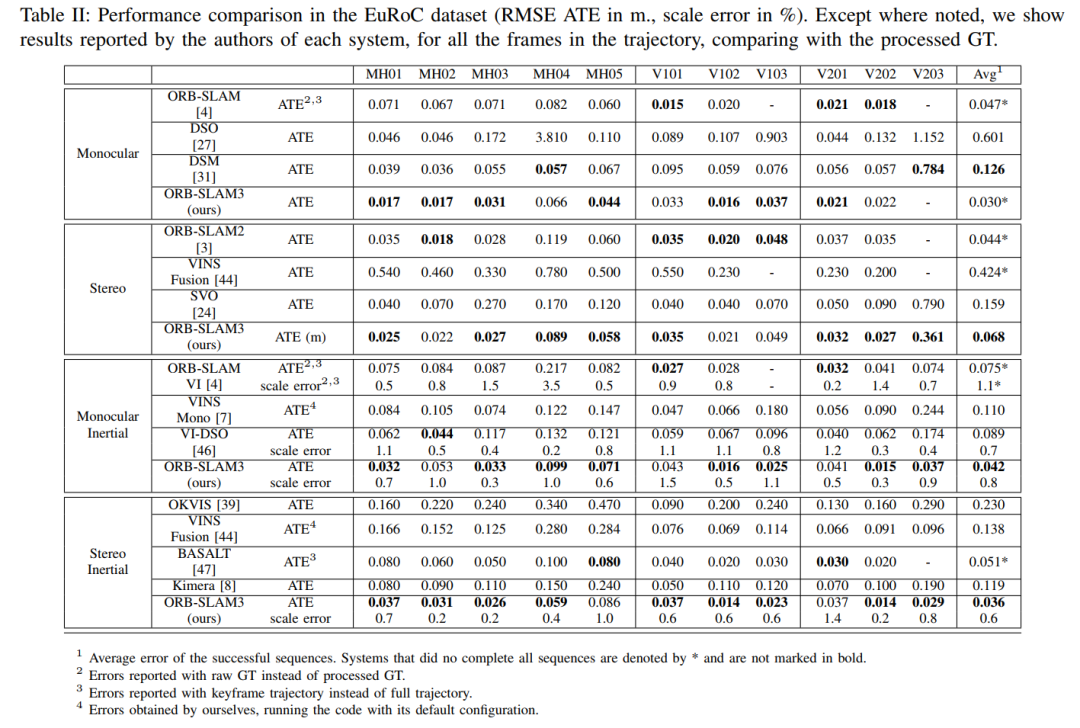
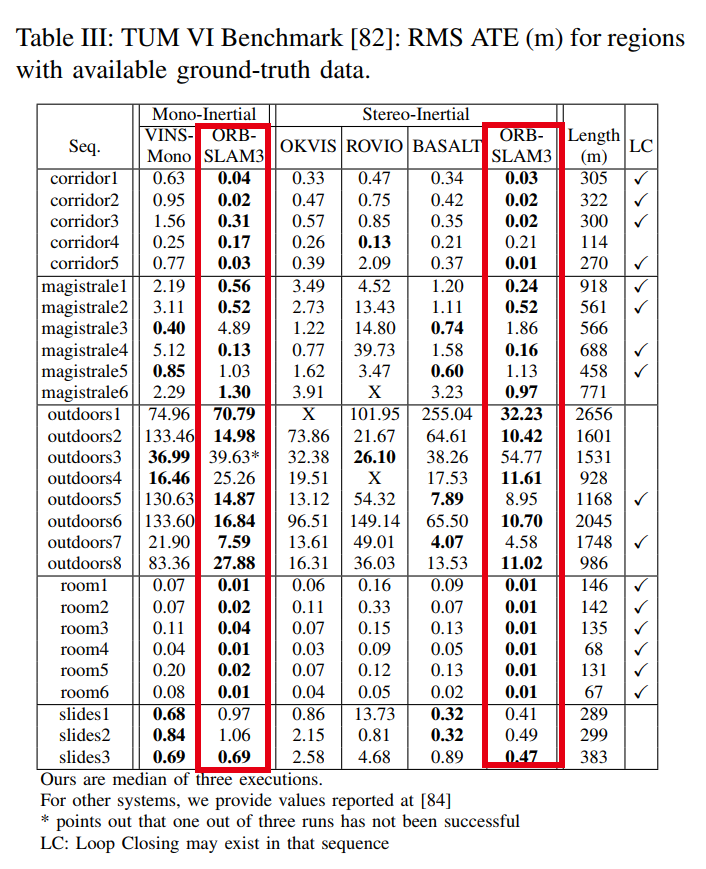
实验表明,在所有传感器配置中,ORB-SLAM3与文献中提供的最佳系统一样强大,并且准确性更高。值得注意的是,stereo惯性SLAM在EuRoC无人机上的平均精度达到3.6 cm,在TUM-VI数据集(代表AR / VR场景的设置)的室内快速手持运动下达到9 mm。
为了社区的利益,ORB-SLAM3开源了!
实验结果
性能拉满!
最后推荐看一下官方给出的视频Demo介绍(含效果演示):
下载
在CVer后台回复:ORB-SLAM3,即可下载本论文和代码!
后台回复:CVPR2020,即可下载CVPR2020 2020代码开源的论文合集
后台回复:ECCV2020,即可下载ECCV 2020代码开源的论文合集
重磅!CVer-SLAM 微信交流群已成立
扫码添加CVer助手,可申请加入CVer-SLAM 微信交流群,目前已汇集800人!涵盖SLAM、视觉SLAM、语义SLAM、激光SLAM等。互相交流,一起进步!
同时也可申请加入CVer大群和细分方向技术群,细分方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch和TensorFlow等群。
一定要备注:研究方向+地点+学校/公司+昵称(如SLAM+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群

▲长按加群

▲长按关注我们
整理不易,请给CVer点赞和在看!