
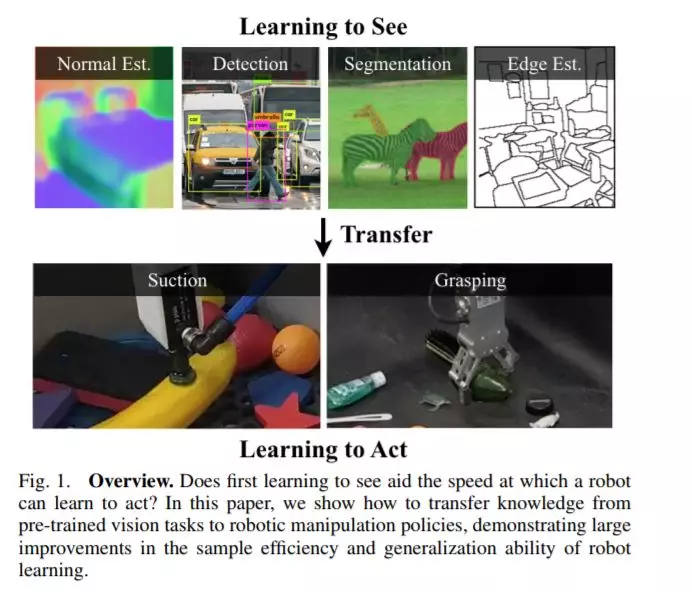
拥有视觉先验(例如,检测物体的能力)是否有助于学习执行基于视觉的操作(例如,拾取物体)?我们在迁移学习的框架下研究这个问题,其中模型首先被训练在一个被动的视觉任务上,然后被调整来执行一个主动的操作任务。我们发现视觉任务的预训练显著地提高了学习操作对象的泛化和样本效率。然而,实现这些收益需要谨慎地选择模型的哪些部分进行转换。我们的主要观点是,标准视觉模型的输出与操作中常用的可视性映射高度相关。因此,我们探索了将模型参数直接从视觉网络转移到启示预测网络的方法,并证明了这一方法可以成功地实现零距离自适应,即机器人可以在零经验的情况下拾取特定的物体。只需少量的机器人经验,我们就可以进一步微调启示模型,以获得更好的结果。只需10分钟的吸力体验或1小时的抓取体验,我们的方法就可以获得80%的成功率来抓取新奇的对象。
成为VIP会员查看完整内容
相关内容

the
IEEE International Conference on Robotics and Automation (ICRA), is an annual academic conference covering advances in robotics. It is one of the premier conferences of its field with an 'A' rating from the Australian Ranking of ICT Conferences obtained in 2010 and an 'A1' rating from the Brazilian ministry of education in 2012.
Arxiv
3+阅读 · 2019年7月8日
Arxiv
3+阅读 · 2019年5月10日
相关VIP内容
相关资讯
相关论文
Arxiv
3+阅读 · 2019年7月8日
Arxiv
3+阅读 · 2019年5月10日