OpenVSLAM:日本新开源”全能“视觉SLAM框架
点击上方“计算机视觉life”,选择“星标”
快速获得第一手干货
本文转载自我爱计算机视觉。
很多人说深度学习和SLAM是计算机视觉目前最火的应用方向。深度学习自不必说,SLAM则已经悄悄走入我们的生活,如扫地机器人、无人机、增强现实游戏等。
日本先进工业科技研究所(National Institute of Advanced Industrial Science and Technology )最近开源了一套视觉SLAM算法:OpenVSLAM。
开源地址:
https://github.com/xdspacelab/openvslam
仅仅三天时间,已经有447颗星。

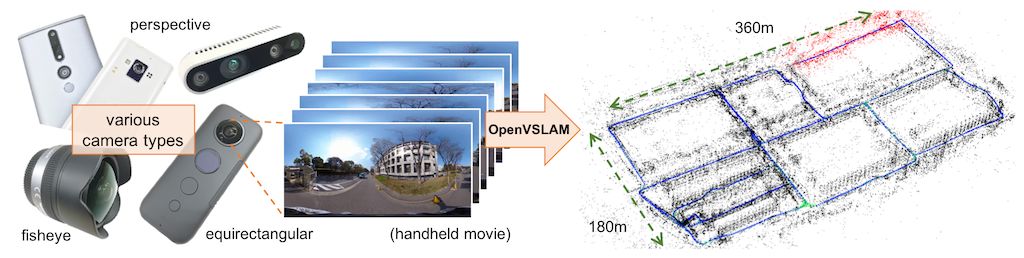
OpenVSLAM是一套单目、立体、RGB-D视觉SLAM系统,其主要特点:
兼容多种相机类型,并可以轻松定制兼容其他类型相机;
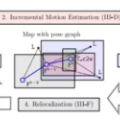
可以存储和加载创建的地图,然后OpenVSLAM可以基于预先构建的地图定位新图像;
系统完全模块化的;
提供了一些代码片段来理解该系统的核心功能。
OpenVSLAM基于具有稀疏特征的间接SLAM算法构建的,例如ORB-SLAM,ProSLAM和UcoSLAM。
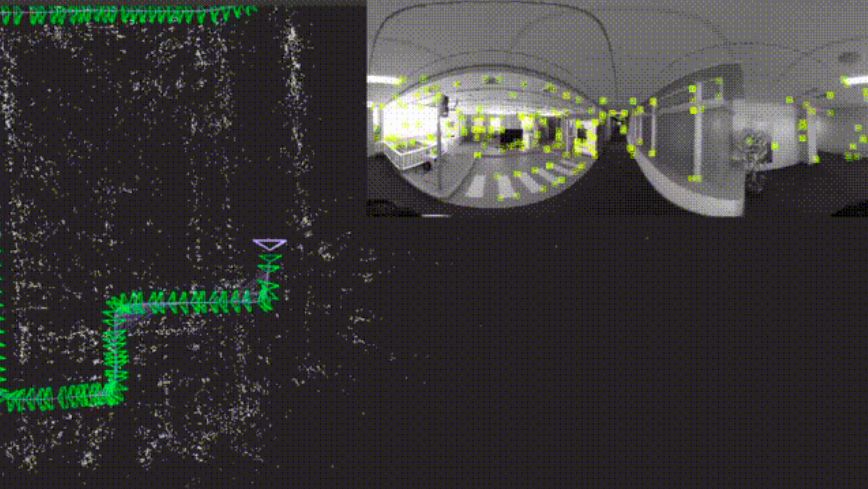
OpenVSLAM的最引人注意的特性是系统可以处理使用多种相机模型捕获的图像,例如透视相机、鱼眼相机和equirectangular相机(环绕平行多相机系统)。如果需要,用户可以轻松实现支持其他的相机模型(例如双鱼眼、catadioptric等)。
例如,使用equirectangular相机模型(RICOH THETA系列,insta360系列等)的视觉SLAM算法如下所示:
官方提供了较详细的文档:
https://openvslam.readthedocs.io/en/master/
简单的教程:
https://openvslam.readthedocs.io/en/master/simple_tutorial.html#
以及使用范例:
https://openvslam.readthedocs.io/en/master/example.html
它可以帮助研究SLAM算法的同学很方便地在三大数据集:
KITTI Odometry dataset、
EuRoC MAV dataset、
TUM RGBD dataset
进行算法性能评测。
该库使用 BSD 2-Clause License,也就是允许商用,但要声明版权方。
学术交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、算法竞赛、图像检测分割、人脸人体、医学影像、综合等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

推荐阅读
从零开始一起学习SLAM | 不推公式,如何真正理解对极约束?
从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
深度学习遇到SLAM | 如何评价基于深度学习的DeepVO,VINet,VidLoc?
新型相机DVS/Event-based camera的发展及应用
从零开始学习SLAM,扫描查看介绍,3天内无条件退款

最新AI干货,我在看