【泡泡一分钟】基于全向激光雷达和各向同性抗辐射探测器融合的跟踪放射源方法(3dv-27)
每天一分钟,带你读遍机器人顶级会议文章
标题:Tracking Radioactive Sources through Sensor Fusion of Omnidirectional LIDAR and Isotropic Rad-detectors
作者:Kristofer Henderson, Kelsey Stadnikia, Allan Martin, Andreas Enqvist, Sanjeev Koppal
来源:3DV 2017 (International Conference on 3D Vision 2017)
播音员:zzq
编译:陈世浪 周平
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

今天介绍的文章是“Tracking Radioactive Sources through Sensor Fusion of Omnidirectional LIDAR and Isotropic Rad-detectors”——基于全向激光雷达和各向同性抗辐射探测器融合的跟踪放射源方法,该文章发表在International Conference On 3D Vision 2017。
跟踪放射源应用于国土安全,机场和港口监视以及军事安全。不幸的是,放射源定位检测器是非常昂贵的,而价格低廉的放射源定位检测器是各向同性的,即它们集中来自以传感器为中心的辐射。
在本文中,作者表明,全向深度传感器和各向同性放射性探测器具有互补的优势,可以实现许多应用。我们对放射源的震源强度进行建模,并将其与激光雷达测量和卡尔曼滤波跟踪器进行整合。这使应用程序能在同一场景追踪墙壁和检测多个放射源。

图1:融合了全向激光雷达探测器和各向同性抗辐射探测器的传感器 。
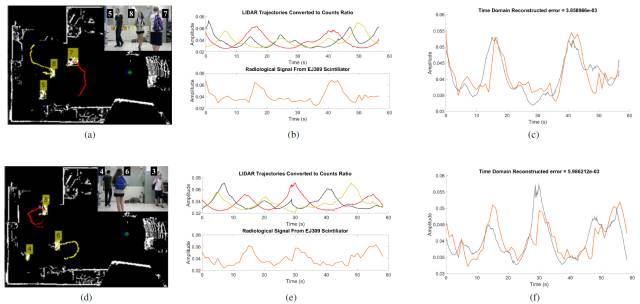
图2:双源跟踪实验结果。
红色和黄色表示携带辐射源的人。(a、d)激光雷达数据的二维表示图像。(b、e)每个人的距离图和辐射数据图。(c,f)辐射信号(橙色)和重建信号(灰色)图。
Abstract
Tracking radioactive sources in large spaces has appli-cations for homeland security, airport and port surveillance as well as military and security uses. Unfortunately, source localizing radiological detectors are extremely expensive, and those with low prices are isotropic - i.e. they integrate radiation from a sphere of directions centered at the sensor. In this paper, we show that omnidirectional depth sensors and isotropic radiological detectors have complementary strengths and can enable many applications. We model the source strength of radiological sources and integrate these with LIDAR measurements and a Kalman filter tracker. This enables applications such as tracking behind walls and de-tecting multiple radiological sources in the same scene.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
在【泡泡机器人SLAM】公众号(paopaorobot_slam)中回复关键字“3dv-27”,即可获取本文下载链接。


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



