
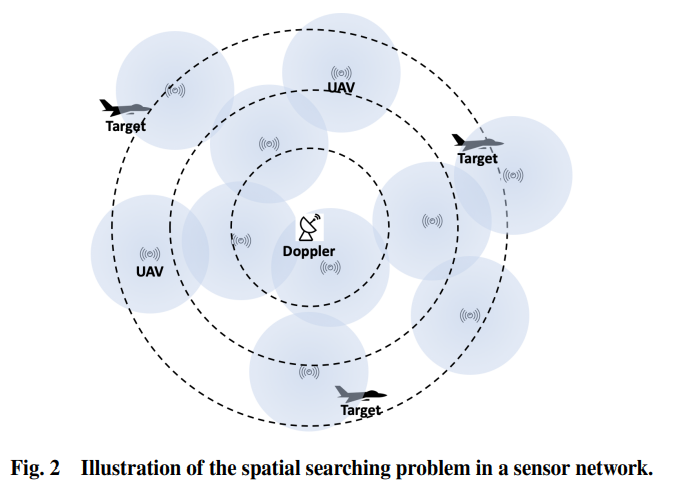
这项工作考虑了一个由多个子系统组成的通用系统,其中可以在系统的不同级别收集可能具有不同概率分布的数据。使用分布的一般公式和最大似然估计的原则,我们开发了一种估计参数的方法,包括与相关性能指标相关的估计的不确定性界限。所提出的方法在两个应用中得到了证明:(1) 通过集成来自 UAV(无人驾驶飞行器)和多普勒雷达的数据来检测目标位置,以及 (2) 在空中加油问题中检测“标记”的位置。
成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2023年2月21日
Arxiv
0+阅读 · 2023年2月17日
Arxiv
0+阅读 · 2023年2月17日


相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2023年2月21日
Arxiv
0+阅读 · 2023年2月17日
Arxiv
0+阅读 · 2023年2月17日