
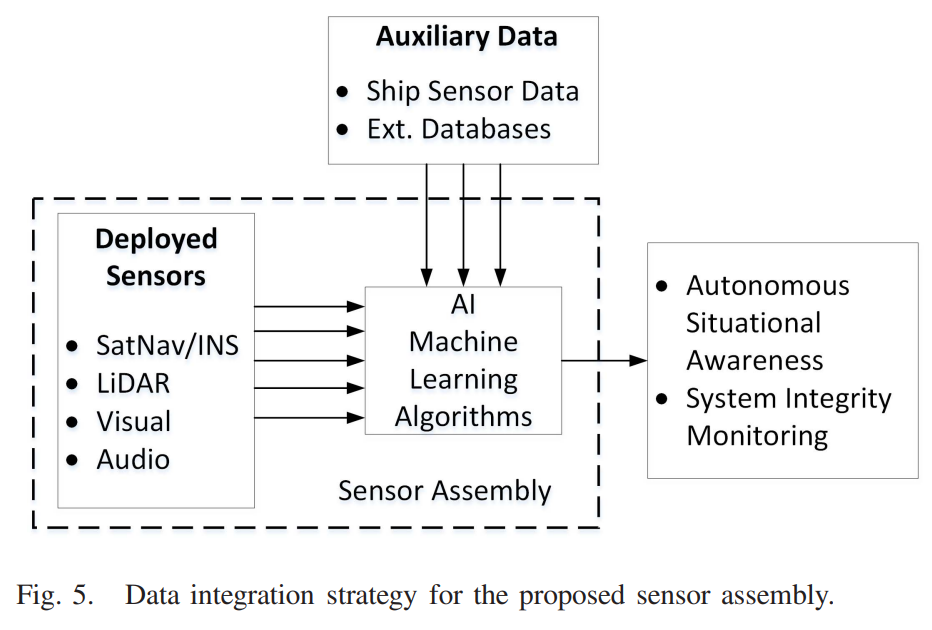
自主船舶有望提高未来海上航行的安全和效率水平。这类船舶需要感知的目的有两个:执行自主态势感知和监测传感器系统本身的完整性。为了满足这些需求,感知系统必须利用人工智能(AI)技术融合来自新型和传统感知传感器的数据。本文概述了对常规和自主航海船舶提出的公认的操作要求,然后着手考虑合适的传感器和相关的人工智能技术用于操作传感器系统。本文考虑了四个传感器系列的整合:用于精确绝对定位的传感器(全球导航卫星系统(GNSS)接收器和惯性测量单元(IMU))、视觉传感器(单目和立体相机)、音频传感器(麦克风)和用于遥感的传感器(RADAR和LiDAR)。此外,还讨论了辅助数据的来源,如自动识别系统(AIS)和外部数据档案。感知任务与定义明确的问题有关,如情况异常检测、船舶分类和定位,这些都可以用人工智能技术解决。机器学习方法,如深度学习和高斯过程,被认为与这些问题特别相关。考虑到操作要求,对不同的传感器和人工智能技术进行了描述,并根据准确性、复杂性、所需资源、对海洋环境的兼容性和适应性,特别是对自主系统的实际实现,对一些先进的例子进行了比较。
本文的结构如下。首先,我们介绍了这一技术领域的最新进展,并回顾了与自主船舶相关的法规。第二,我们回顾了自主船舶的关键性能指标(KPI),并将其转化为操作要求。第三,我们回顾了与这些指标有关的传感器技术。第四,由于传感器以几种不同的格式发布数据,我们回顾了已经成功应用于融合多模式数据的人工智能技术。最后,我们以对未来工作的建议来结束本文。
成为VIP会员查看完整内容
相关内容


相关VIP内容
相关资讯
相关论文