使用空间分布的多个雷达节点,在不受约束的运动方向上研究了连续人类活动的识别,在使用单个节点时,活动可能发生在不利的角度或被遮挡的视角。此外,这种网络不仅有利于实现上述目标,而且也有利于可能需要不止一个传感器的更大的受控监视区域。具体来说,当目标位于长距离和不同角度时,分布式网络可以在节点之间显示出显著的特征差异。雷达数据可以用不同的域来表示,其中人类活动识别(HAR)的一个广为人知的域是微多普勒频谱图。然而,其他域可能更适合于更好的分类性能,或对计算资源有限的低成本硬件更有优势,如范围-时间或范围-多普勒域。一个开放的问题是如何利用从上述数据域以及从同时观察监视区域的不同分布式雷达节点中提取信息的多样性。为此,数据融合技术可以在每个雷达节点的数据表示层面以及网络中不同节点之间使用。将利用所介绍的决策融合方法(通常在每个节点上操作一个分类器)或特征融合方法(在使用一个单一的分类器之前对数据进行串联),研究它们在连续序列分类中的性能,这是一种更加自然和现实的人类运动分类方式,同时也考虑到数据集中固有的不平衡。
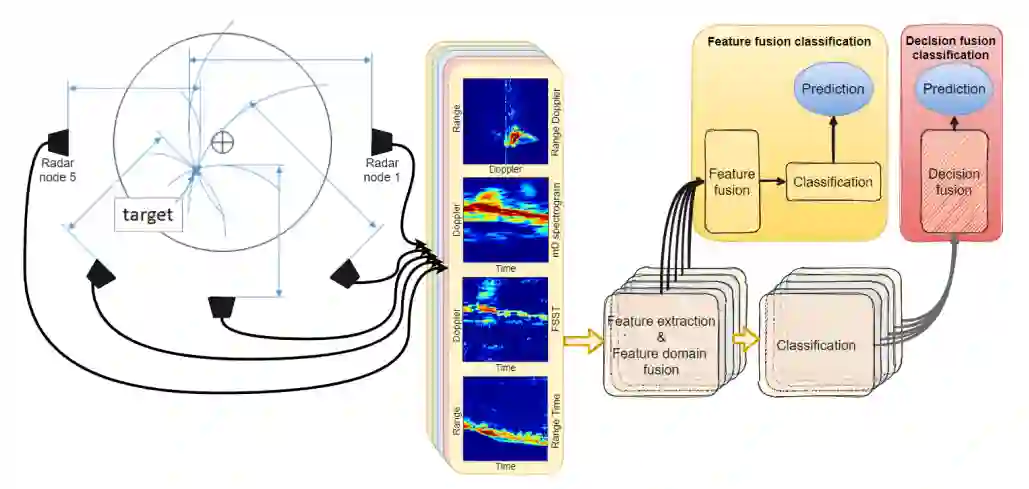
图 1:所提出方法的示意图:从各个雷达节点提取的数据域被组合(“数据域融合”)。然后应用决策融合或特征融合来组合来自节点的信息。
方法
雷达网络在适应能力、分类指标和跟踪性能方面已经显示出其优势。这是通过增加整体信息内容来实现的,这要归功于对场景和感兴趣的目标的多视角观察。然而,网络中雷达的有效利用依赖于可靠地结合来自不同传感器的各种信息的能力。最近,具有多个合作雷达的分布式网络引起了人们的极大兴趣,以解决在不利角度记录的微多普勒(mD spec.)信号、遮挡或仅对少数观察者节点可见的目标问题[1]-[10]。
在这种情况下,为了提高分类性能,找到融合网络中多个雷达节点信息的最佳技术,仍然是一个突出的研究问题。这对于连续人类活动序列的分类特别重要。相对于更传统的对单独记录的人工分离活动的分类,这些活动在文献中被越来越多地研究,因为它们更加真实和自然[11]-[13]。
本文研究了应用于来自节点网络的融合数据的机器学习分类器,重点是特征融合("早期融合")和决策融合("后期融合")方法,这些方法在一个公开的数据集上得到了验证[14]。在这种情况下,大多数研究工作主要集中在微多普勒(mD)频谱图上,作为感兴趣的数据格式,而这项工作还利用了以下领域,即范围多普勒(RD)、傅里叶同步挤压变换(FSST)频谱和范围时间(RT)图。本文将这些数据域的信息融合与整个网络的雷达节点融合联合起来进行研究。应该指出的是,这种跨越不同数据格式和网络中不同雷达节点的高效和有效的数据融合问题不仅与人类活动分类有关,而且在任何可以使用来自分布式雷达节点的信息的监视和态势感知问题上也是如此。
在方法上,首先通过利用基于奇异值分解(SVD)的一维主成分分析(PCA)来提取上述每个数据域的信息,这是一个简单而有效的工具,用于提取图像的特征进行分类。Fioranelli等人[3]举例说明了使用SVD相关的特征来分析具有不同角度轨迹的人类多态行走场景。他们提出,SVD可以用来从mD频谱图中提取最相关的特征,方法是使用有限数量的左侧奇异向量,这些奇异向量与最高奇异值有关。在[3]中证明,在使用极少的甚至只是单一的最高相关奇异值的情况下,可以达到90%以上的分类结果,最好是96%的最佳角度轨迹。
然后,在这项工作中,还研究了基于矩阵eigendecomposition的二维主成分分析(2D PCA),它被证明能带来更好的准确性和减少计算时间。对于这两种特征提取方法,采用了四种机器学习分类器,即决策树(DT)分类器、k-近邻(KNN)分类器、天真贝叶斯(NB)分类器和支持向量机(SVM),以评估上述融合方法,图1为示意图。
本文的其余部分组织如下。第2.0节显示了包括数据处理参数在内的数据域。第3.0节提供了特征融合和机器学习方法。第4节介绍了实验结果,第5节给出了最后的评论。