
准确和强大的自主水下导航(AUV)需要在各种条件下进行位置估计的基本任务。此外,美国海军更希望拥有不依赖外部信标系统的系统,如全球定位系统(GPS),因为它们会受到干扰和欺骗,并会降低操作效率。目前的方法,如地形辅助导航(TAN),使用外部感知成像传感器来建立一个本地参考位置估计,当这些传感器超出范围时,就没有用了。现在需要的是多个导航过滤器,每个过滤器都能根据任务条件发挥更大的作用。本论文研究了如何结合多个导航过滤器来提供一个更稳健的AUV位置估计。提出的解决方案是利用基于信息论框架的交互式多模型(IMM)估计方法,混合两种不同的过滤方法。第一个过滤器是基于模型的扩展卡尔曼过滤器(EKF),在航位推算(DR)条件下有效。第二个是用于主动地形辅助导航(ATAN)的粒子滤波方法,在传感器范围内适用。利用在华盛顿州新月湖收集的数据,我们开发了每个导航过滤器的结果,然后我们演示了如何使用IMM信息理论方法来混合方法,以改善位置和方向的估计。


近年来,美国防部已指示加速采用人工智能(AI),并建立一支技术先进、能够确保美国安全的部队。未来自主海上行动的一个重要组成部分是无人自主车辆能够在不使用全球定位系统(GPS)或其他外部信标系统的情况下运行。
在一个快速发展的技术世界中,在拒绝使用GPS的环境中或不使用声学转发器等系统,甚至是深海导航定位系统(POSYDON)系统的情况下进行操作从未如此关键。领先的解决方案是地形辅助导航(TAN),它利用机载地图和传感器系统的组合,以便在已知的地图内进行相关的测量。这种方法的最大缺点是需要不同的滤波估计方法,而这些方法在设计上可能无法协同工作。
这项研究将分几个部分介绍。首先是实施一个新的扩展卡尔曼滤波器(EKF),作为海军研究生院的远程环境监测单元100(REMUS)车辆上的航位推算(DR)模型,以改善其在速度估计不准确时的估计。其次,这项研究试图在信息理论的基础上建立一个用于主动地形辅助导航(ATAN)的粒子过滤器(PF)。最后,也许是最重要的,本研究试图在PF和EKF之间实现一个新的信息理论联合过程,以改善所有状态的估计。

图 1.1 定位、导航和授时替代层次结构。

图1.2 可能需要不同过滤技术的情况。状况1,AUV在水面附近作业,可以利用GPS数据。由于深度原因,AUV无法利用任何其他传感器,必须使用DR模型。状态2,太深了,无法快速获取GPS数据,而且还没有深到可以使用面向海底的传感器。制度3可以利用DVL/ADCP和惯性导航系统(INS),可以提供更准确的运动估计。制度4可以利用成像传感器来进一步提高导航的准确性。
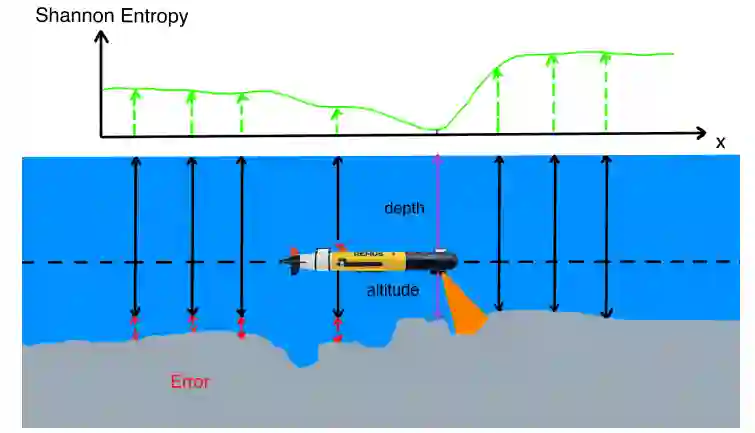
图5.1 机载水深和成像传感器提供的测量值与粒子分布相关。该分布的香农熵显示了粒子分布中的不确定性,高值表明该分布对位置不确定。由于从AUV经历地形到计算香农熵有一个时间延迟,标量值不会完全一致。然而,它将很好地表明分布具有低水平的不确定性。
论文组织
本论文的组织结构如下。第2章是文献回顾,包括设备说明、贝叶斯滤波(BF)和信息论的必要背景,以及现场实验的概述。第3章将介绍位置估计滤波技术和交互式多模型(IMM)的概述。第4章将讨论基于模型的扩展卡尔曼滤波器(EKF)的发展。第5章将讨论粒子滤波器(PF)的开发和仿真结果。第6章将讨论信息理论互动多模型(IT-IMM)的开发和仿真结果。论文将在第7章中总结和讨论未来的工作。
论文贡献
-
介绍一种新的IT-IMM估算方法,通过综合使用后验概率分布中的香农熵和预测PF性能的地形适宜性措施,将基于模型的EKF和PF联合起来。
-
在没有ADCP/DVL的情况下,基于模型的EKF用于估计前进和侧滑速度。
-
一种PF算法,实现了粒子再分配的信息理论框架。


