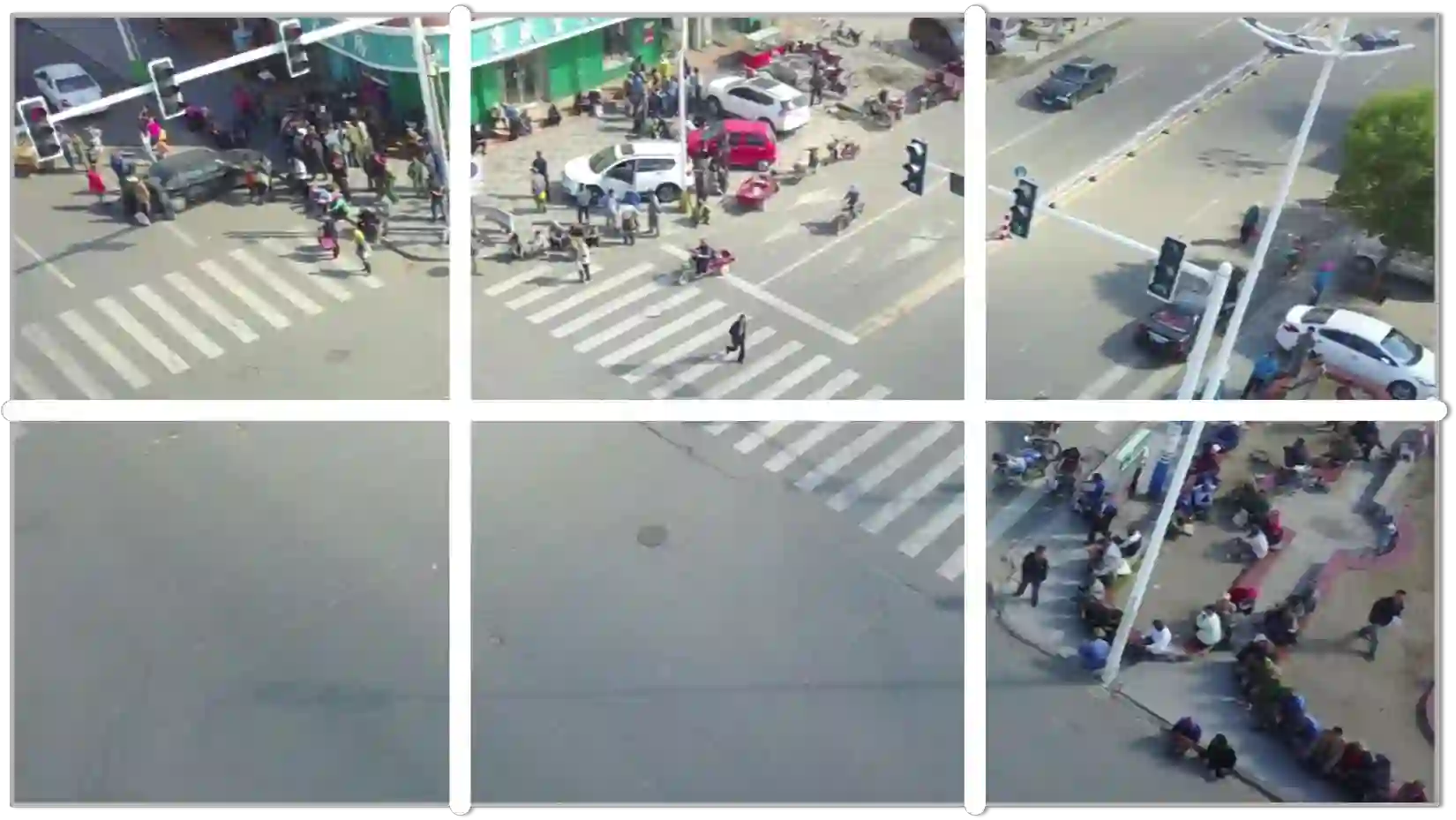
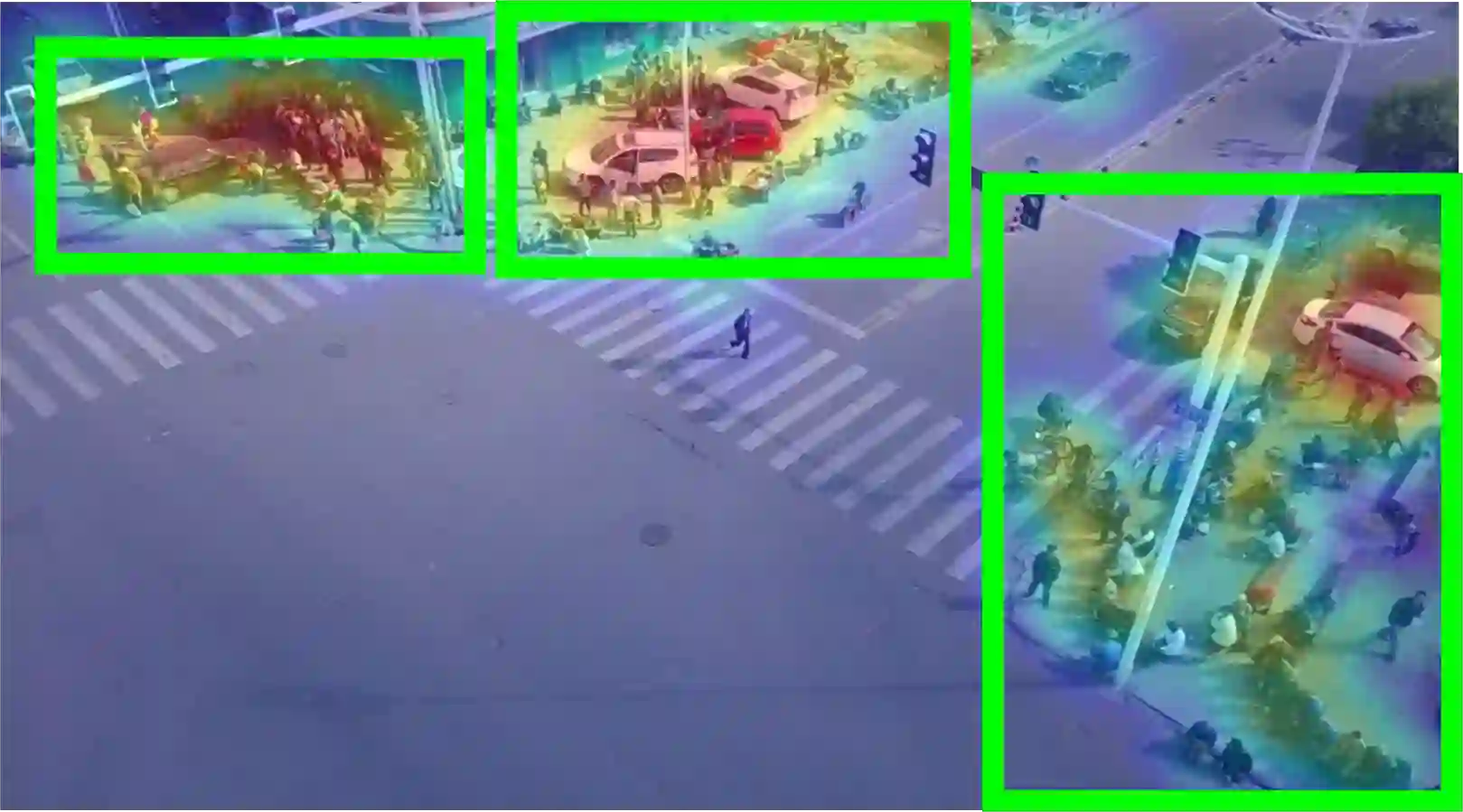
Detecting objects in aerial images is challenging for at least two reasons: (1) target objects like pedestrians are very small in pixels, making them hardly distinguished from surrounding background; and (2) targets are in general sparsely and non-uniformly distributed, making the detection very inefficient. In this paper, we address both issues inspired by observing that these targets are often clustered. In particular, we propose a Clustered Detection (ClusDet) network that unifies object clustering and detection in an end-to-end framework. The key components in ClusDet include a cluster proposal sub-network (CPNet), a scale estimation sub-network (ScaleNet), and a dedicated detection network (DetecNet). Given an input image, CPNet produces object cluster regions and ScaleNet estimates object scales for these regions. Then, each scale-normalized cluster region is fed into DetecNet for object detection. ClusDet has several advantages over previous solutions: (1) it greatly reduces the number of chips for final object detection and hence achieves high running time efficiency, (2) the cluster-based scale estimation is more accurate than previously used single-object based ones, hence effectively improves the detection for small objects, and (3) the final DetecNet is dedicated for clustered regions and implicitly models the prior context information so as to boost detection accuracy. The proposed method is tested on three popular aerial image datasets including VisDrone, UAVDT and DOTA. In all experiments, ClusDet achieves promising performance in comparison with state-of-the-art detectors. Code will be available in \url{https://github.com/fyangneil}.
翻译:在空中图像中检测物体具有挑战性,原因至少有两个:(1) 像行人这样的目标物体在像素中非常小,很难将其与周围背景区分开来;(2) 目标一般分布稀少,分布不统一,使探测效率非常低。在本文中,我们处理这两个问题,因为观察这些目标往往被分组。特别是,我们提议建立一个集群探测(ClusDet)网络,在端对端框架内统一物体集群和探测。CluusDet的关键组成部分包括一个分组建议子网络(CPNet)、一个比例估计子网络(SASBNet)和一个专用探测网络(DetecNet)。鉴于输入图像,NCPet产生目标集群区域,而ScelNet为这些地区估算目标尺度。然后,每个比例调整的集群区域被输入到DetecncNet,用于目标探测。ClusDeusDelt比以前的解决方案有几处优势:(1) 大幅减少用于最终目标探测的芯片数量,从而实现高运行时间效率。(2) 基于集群的小规模估算比先前使用的单盘探测/轨道数据系统更精确,因此,在前的ASG-drodro 测试区域将可有效改进。