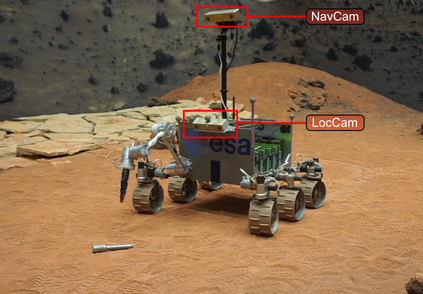
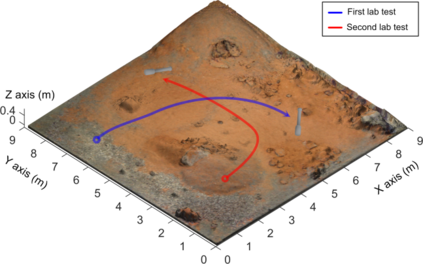
The goal of the Mars Sample Return campaign is to collect soil samples from the surface of Mars and return them to Earth for further study. The samples will be acquired and stored in metal tubes by the Perseverance rover and deposited on the Martian surface. As part of this campaign, it is expected the Sample Fetch Rover will be in charge of localizing and gathering up to 35 sample tubes over 150 Martian sols. Autonomous capabilities are critical for the success of the overall campaign and for the Sample Fetch Rover in particular. This work proposes a novel approach for the autonomous detection and pose estimation of the sample tubes. For the detection stage, a Deep Neural Network and transfer learning from a synthetic dataset are proposed. The dataset is created from photorealistic 3D simulations of Martian scenarios. Additionally, Computer Vision techniques are used to estimate the detected sample tubes poses. Finally, laboratory tests of the Sample Localization procedure are performed using the ExoMars Testing Rover on a Mars-like testbed. These tests validate the proposed approach in different hardware architectures, providing promising results related to the sample detection and pose estimation.
翻译:火星取样返回运动的目标是从火星表面收集土壤样品,并将这些样品送回地球进一步研究。这些样品将由远距探测器购置并储存在金属管中,并存放在火星表面。作为这一运动的一部分,预计样品提取路弗将负责150多火星索尔以上35个样品管的本地化和收集。自主能力对整个运动的成功至关重要,特别是对样品提取路弗来说。这项工作为自动探测和估计样品管提出了新的方法。在探测阶段,提出了深神经网络和从合成数据集中学习的转移。数据集是从火星情景的摄影现实3D模拟中创建的。此外,计算机视野技术用于估计所检测到的样品管构成。最后,对样品本地化程序的实验室测试是使用类似于火星试验床的Exomars测试路弗进行的。这些测试证实了不同硬件结构中的拟议方法,提供了与样品探测和表面估计有关的有希望的结果。