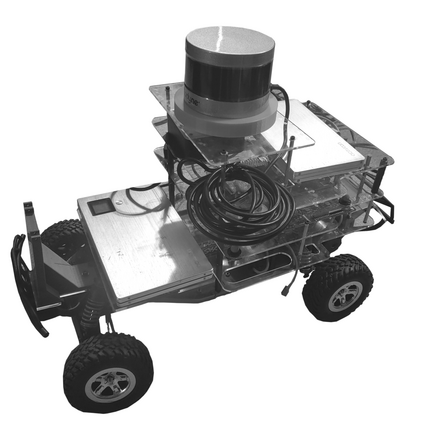
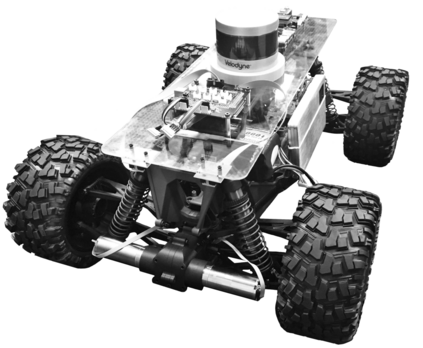
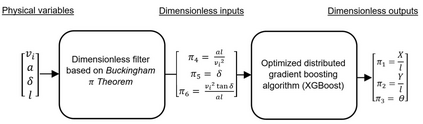
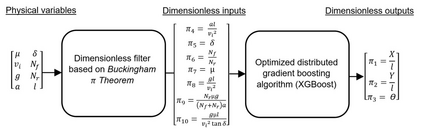
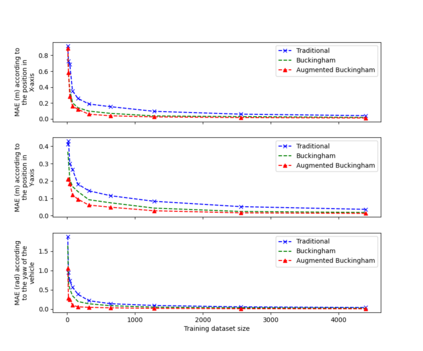
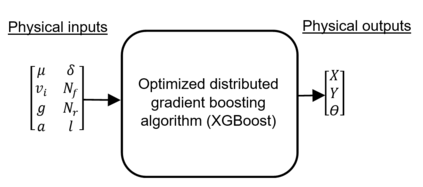
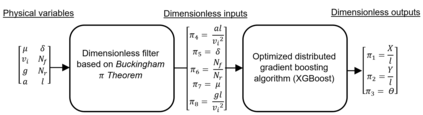
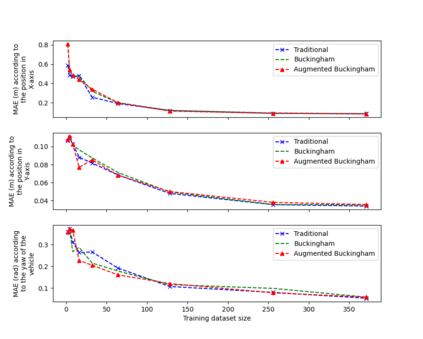
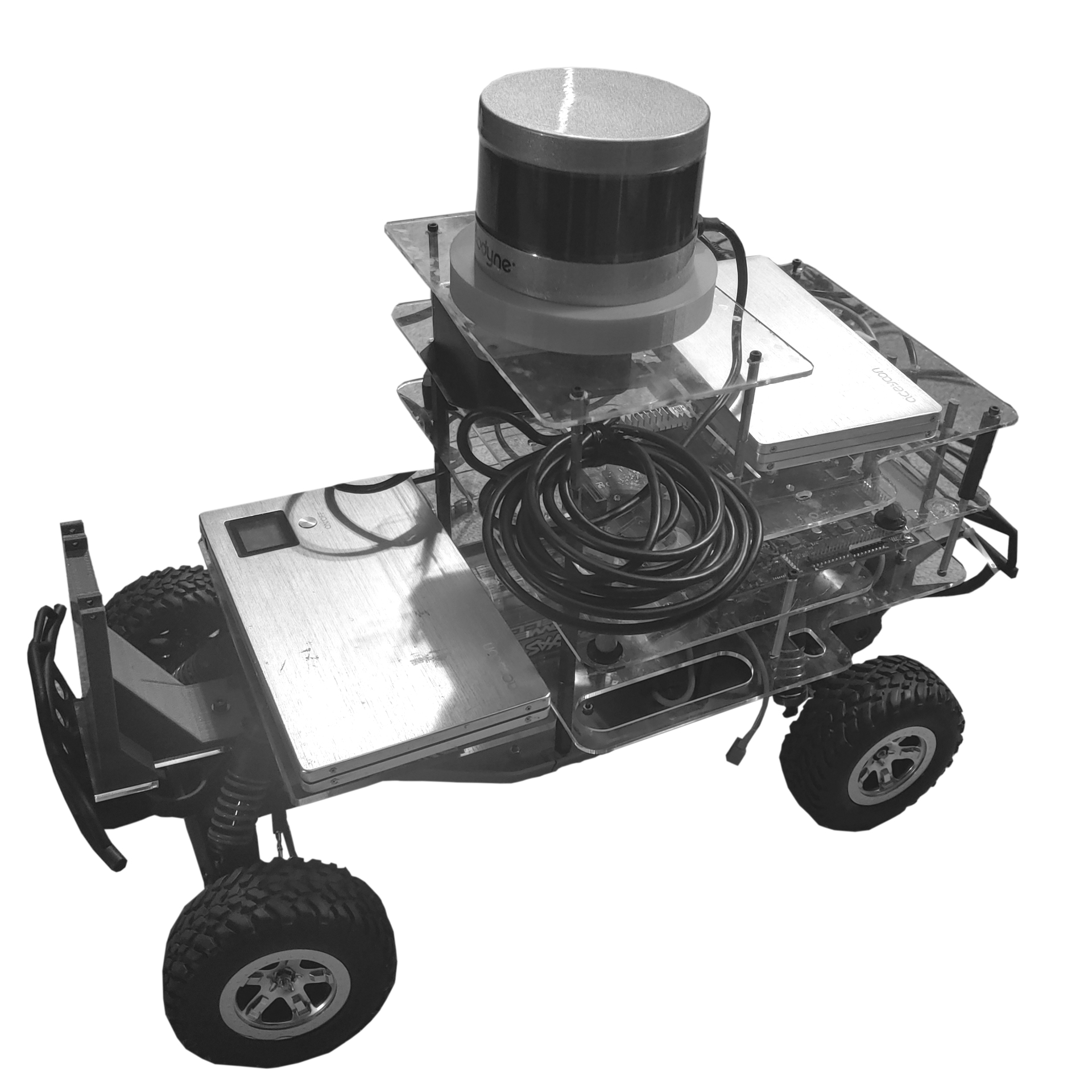
Learning schemes for planning and control are limited by the difficulty of collecting large amounts of experimental data or having to rely on high-fidelity simulations. This paper explores the potential of a proposed learning scheme that leverages dimensionless numbers based on Buckingham's $\pi$ theorem to improve data efficiency and facilitate knowledge sharing between similar systems. A case study using car-like robots compares traditional and dimensionless learning models on simulated and experimental data to validate the benefits of the new dimensionless learning approach. Preliminary results show that this new dimensionless approach could accelerate the learning rate and improve the accuracy of the model and should be investigated further.
翻译:暂无翻译