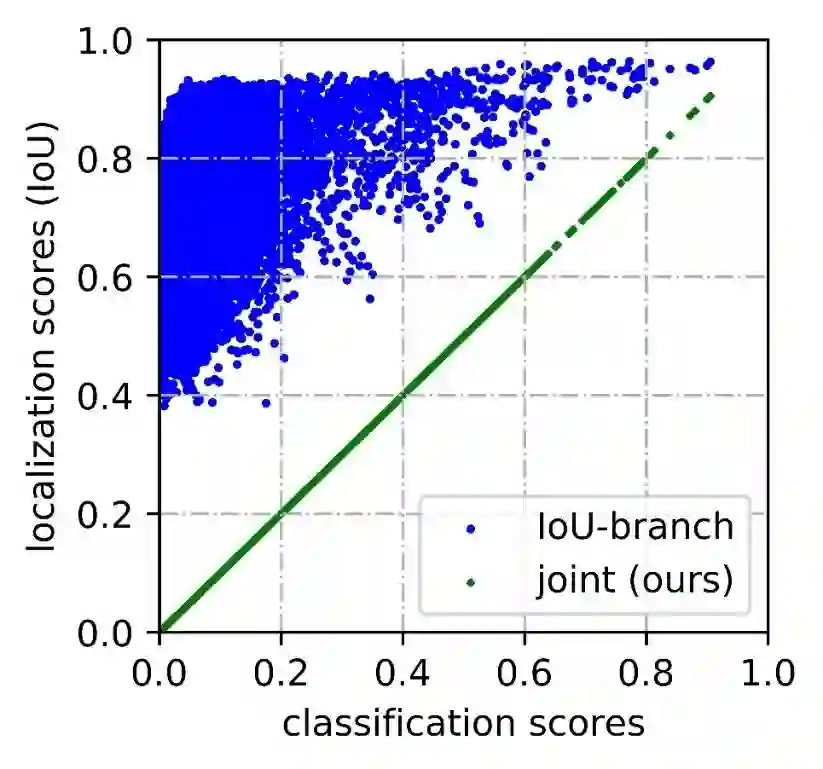
One-stage detector basically formulates object detection as dense classification and localization. The classification is usually optimized by Focal Loss and the box location is commonly learned under Dirac delta distribution. A recent trend for one-stage detectors is to introduce an individual prediction branch to estimate the quality of localization, where the predicted quality facilitates the classification to improve detection performance. This paper delves into the representations of the above three fundamental elements: quality estimation, classification and localization. Two problems are discovered in existing practices, including (1) the inconsistent usage of the quality estimation and classification between training and inference and (2) the inflexible Dirac delta distribution for localization when there is ambiguity and uncertainty in complex scenes. To address the problems, we design new representations for these elements. Specifically, we merge the quality estimation into the class prediction vector to form a joint representation of localization quality and classification, and use a vector to represent arbitrary distribution of box locations. The improved representations eliminate the inconsistency risk and accurately depict the flexible distribution in real data, but contain continuous labels, which is beyond the scope of Focal Loss. We then propose Generalized Focal Loss (GFL) that generalizes Focal Loss from its discrete form to the continuous version for successful optimization. On COCO test-dev, GFL achieves 45.0\% AP using ResNet-101 backbone, surpassing state-of-the-art SAPD (43.5\%) and ATSS (43.6\%) with higher or comparable inference speed, under the same backbone and training settings. Notably, our best model can achieve a single-model single-scale AP of 48.2\%, at 10 FPS on a single 2080Ti GPU. Code and models are available at https://github.com/implus/GFocal.
翻译:一级探测器基本上将物体检测作为密集的分类和本地化。分类通常通过Councle Loss进行优化,框位置通常在Dirac delta的分布中学习。一个阶段探测器的最近趋势是引入一个单级预测分支,以估计本地化的质量,预测质量有助于对检测性能进行分类。本文将上述三个基本要素(质量估计、分类和本地化)的表达方式分为以下三个基本要素:质量估计、分类和本地化。在现行做法中发现两个问题,包括:(1) 质量估计和分类在培训和推断之间的使用不一致;(2) 在复杂场景中模糊和不确定时,对本地化的不灵活Dirac delta分布。为了解决问题,我们为这些元素设计新的演示。具体地说,我们将质量估计与等级预测矢量合并,以共同表示本地化质量和分类质量的代码,并用一个矢量表示框地点的任意分布。改进的表达方式消除了不一致的风险,并准确地描述真实数据中的弹性分布,但含有超出核心损失范围的连续标签。我们然后建议G101-SAL-SL-SO的通用标准(G-SAL-SAL-SAL-SAL-C-Cxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx