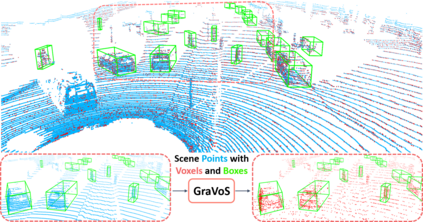
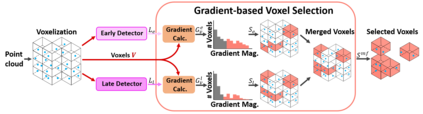
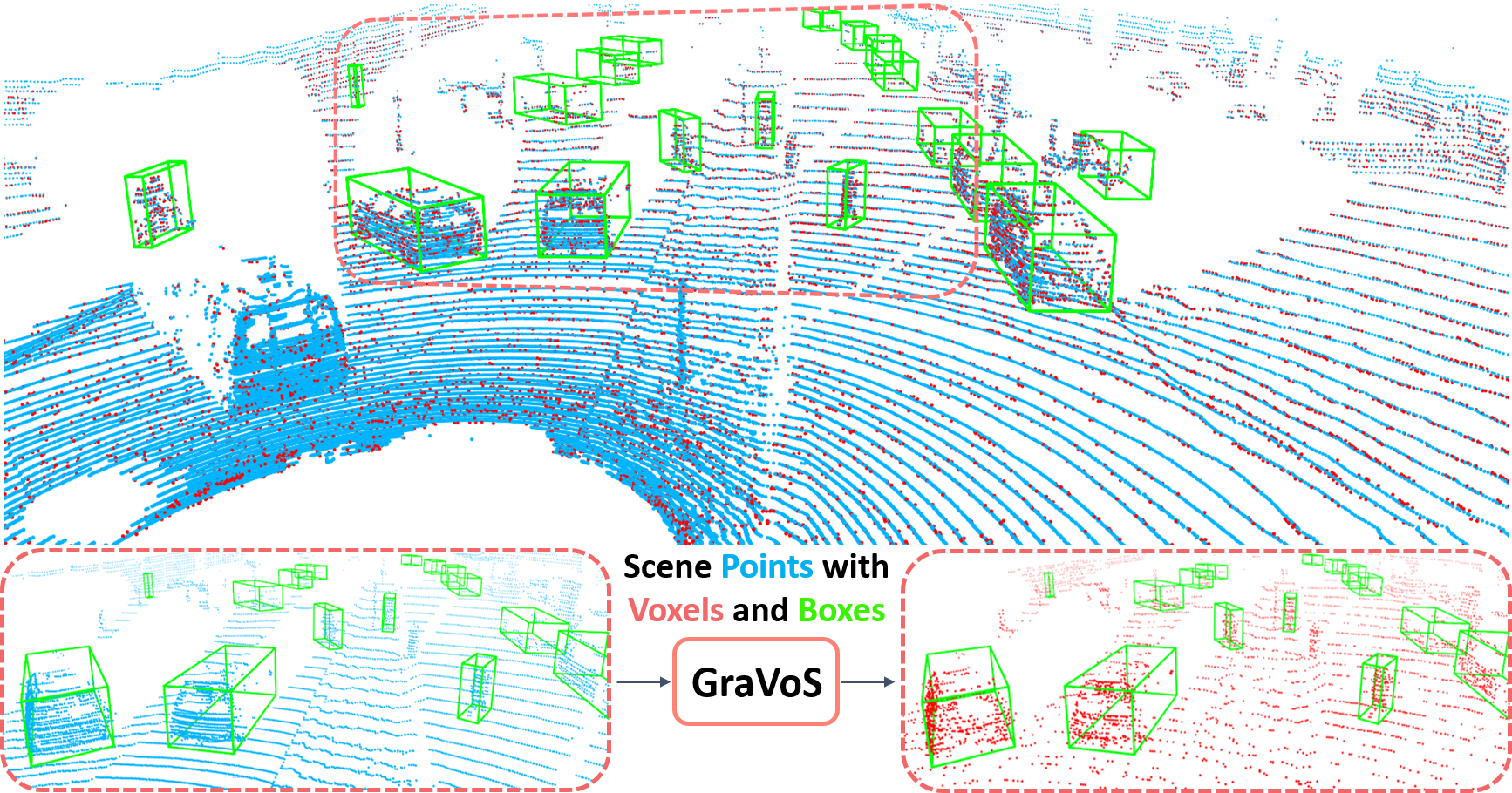
3D object detection within large 3D scenes is challenging not only due to the sparse and irregular 3D point clouds, but also due to the extreme foreground-background imbalance in the scene and class imbalance. A common approach is to add ground-truth objects from other scenes. Differently, we propose to modify the scenes by removing elements (voxels), rather than adding ones. Our approach selects the "meaningful" voxels, in a manner that addresses both types dataset imbalance. The approach is general and can be applied to any voxel-based detector, yet the meaningfulness of a voxel is network-dependent. Our voxel selection is shown to improve the performance of several prominent 3D detection methods.
翻译:3D 大型 3D 场景中的 3D 对象探测不仅由于 3D 点云稀少且不规则,而且由于 场景的地表背景极端不平衡和阶级不平衡, 3D 对象探测具有挑战性。 通常的做法是从其他场景中添加地面真实对象。 不同地, 我们提议通过删除元素( voxels) 而不是添加元素来修改场景。 我们的方法选择“ 有意义的” oxel, 处理两种类型的数据集不平衡。 这种方法是一般性的, 可以适用于任何基于 voxel 的探测器, 但是 voxel 的有意义的是依赖于网络的。 我们的 voxel 选择显示可以改善几个突出的 3D 探测方法的性能 。