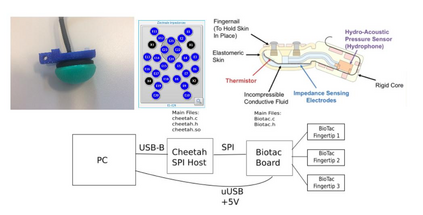
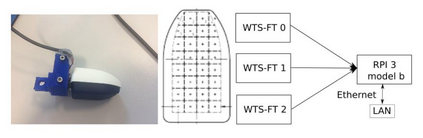
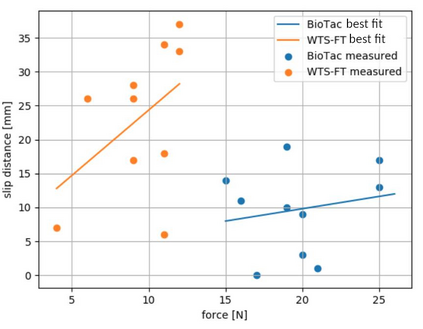
Robots are expected to grasp a wide range of objects varying in shape, weight or material type. Providing robots with tactile capabilities similar to humans is thus essential for applications involving human-to-robot or robot-to-robot interactions, particularly in those situations where a robot is expected to grasp and manipulate complex objects not previously encountered. A critical aspect for successful object grasp and manipulation is the use of high-quality fingertips equipped with multiple high-performance sensors, distributed appropriately across a specific contact surface. In this paper, we present a detailed analysis of the use of two different types of commercially available robotic fingertips (BioTac and WTS-FT), each of which is equipped with multiple sensors distributed across the fingertips' contact surface. We further demonstrate that, due to the high performance of the fingertips, a complex adaptive grasping algorithm is not required for grasping of everyday objects. We conclude that a simple algorithm based on a proportional controller will suffice for many grasping applications, provided the relevant fingertips exhibit high sensitivity. In a quantified assessment, we also demonstrate that, due in part to the sensor distribution, the BioTac-based fingertip performs better than the WTS-FT device, in enabling lifting of loads up to 850g, and that the simple proportional controller can adapt the grasp even when the object is exposed to significant external vibrational challenges.
翻译:预计机器人将掌握各种形状、重量或材料类型的不同物体。因此,为机器人提供与人类相似的触觉能力,对于涉及人类对机器人或机器人对机器人的相互作用的应用至关重要,特别是在机器人预期会掌握和操作以前没有遇到过的复杂物体的情况下。成功掌握和操纵物体的一个关键方面是使用配备多种高性能传感器的高品质指尖,在特定接触面上适当分布。在本文中,我们详细分析使用两种不同的商用机器人指尖(BioTac和WTS-FT)的使用,每种指尖都配有分布在指尖接触表面的多种传感器。我们进一步证明,由于指尖的性能很高,不需要一种复杂的适应掌握算法来掌握日常物体。我们的结论是,基于比例控制器的简单算法将足以使许多应用程序掌握,但相关的指尖显示高度敏感度。在量化评估中,我们还表明,在使直径50的直控传感器分布到直径8级时,可以使直径的直径的直径推到直径50,推到直方的直径直方,推至直径直径直到直方的传感器分布。我们的结论是,在前端推到直径50,推到伸伸伸伸伸伸至直至伸至伸至伸至伸至伸至伸至伸至直至伸至伸至伸至伸至伸至直至伸缩到伸缩到伸缩到直至直至直至伸至伸至伸缩到伸至伸至伸至伸至伸至直至直至伸至伸至伸至直至直至直至直至直至直至伸缩至直至伸至伸缩的伸缩的伸缩的伸缩的推到直至直至直至直至直至直至直至直至直至直至直至伸直至伸直至直至直至直至直至直至直至直至直至直至直至直至直至直至直至直至直至直至直至伸缩至伸缩至伸缩至伸缩至直至直至直至直至伸直至直至直至直至直至直至直至。。