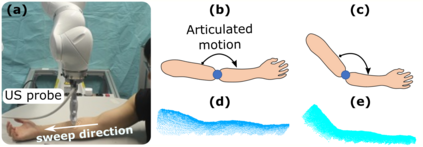
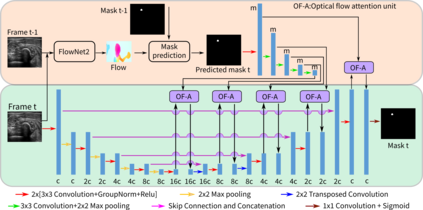
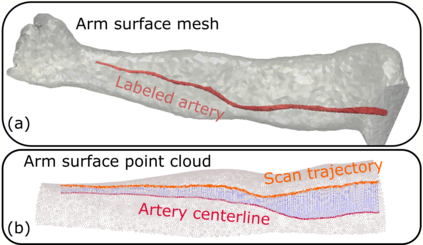
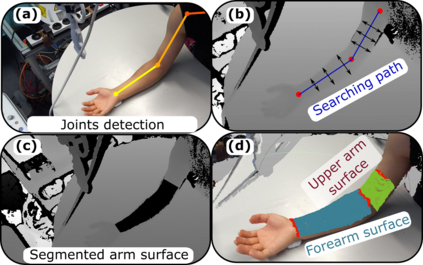
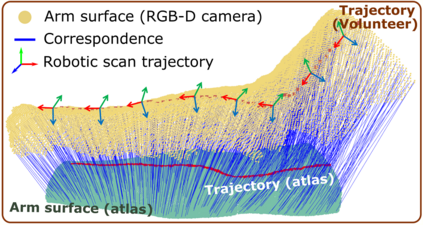
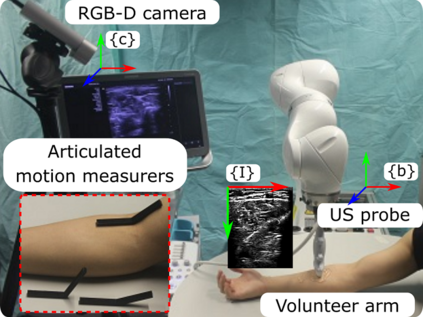
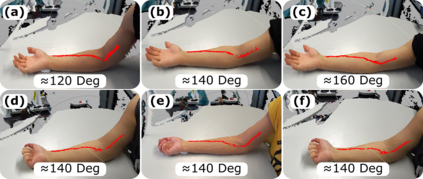
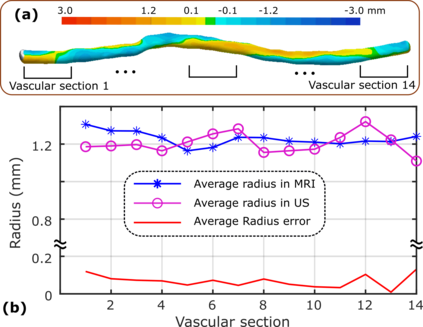
Robotic ultrasound (US) imaging aims at overcoming some of the limitations of free-hand US examinations, e.g. difficulty in guaranteeing intra- and inter-operator repeatability. However, due to anatomical and physiological variations between patients and relative movement of anatomical substructures, it is challenging to robustly generate optimal trajectories to examine the anatomies of interest, in particular, when they comprise articulated joints. To address this challenge, this paper proposes a vision-based approach allowing autonomous robotic US limb scanning. To this end, an atlas MRI template of a human arm with annotated vascular structures is used to generate trajectories and register and project them onto patients' skin surfaces for robotic US acquisition. To effectively segment and accurately reconstruct the targeted 3D vessel, we make use of spatial continuity in consecutive US frames by incorporating channel attention modules into a U-Net-type neural network. The automatic trajectory generation method is evaluated on six volunteers with various articulated joint angles. In all cases, the system can successfully acquire the planned vascular structure on volunteers' limbs. For one volunteer the MRI scan was also available, which allows the evaluation of the average radius of the scanned artery from US images, resulting in a radius estimation ($1.2\pm0.05~mm$) comparable to the MRI ground truth ($1.2\pm0.04~mm$).
翻译:超机器人(US)成像(US)旨在克服美国自由手式检查的某些限制,例如难以保证操作者内部和操作间重复检查,然而,由于病人之间的解剖和生理差异以及解剖子结构相对移动,很难强有力地生成最佳轨迹来检查感兴趣的解剖仪,特别是当它们包含清晰的连接时。为了应对这一挑战,本文件提议了一种基于愿景的方法,允许美国自主机器人四肢扫描。为此,使用了配有附加说明血管结构的人体手臂的地图集MRI模板来生成轨迹和注册,并将其投射到患者皮肤表面,供美国机器人采购。为了有效地分割和准确地重建目标3D容器,我们利用连续的美国框架空间连续性,将频道关注模块纳入一个U-Net型神经网络。自动轨迹生成方法由6名志愿者用各种清晰的联合角度进行评估。在所有情况下,系统都能够成功地获得计划中的美元血管结构中的配有附加注释的血管结构的MRI模板,并用于将它们投射到患者的皮肤表面表面。 5号自愿扫描机的半径(1美元)使得一个可进行地面的扫描半径能。