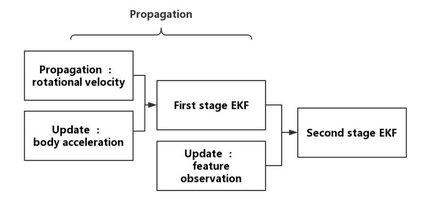
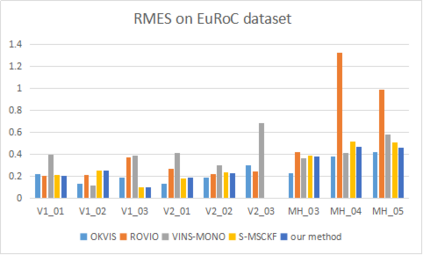
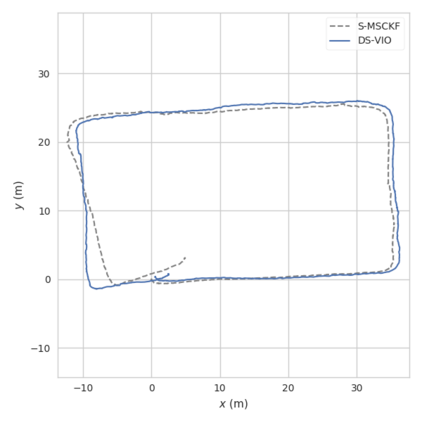
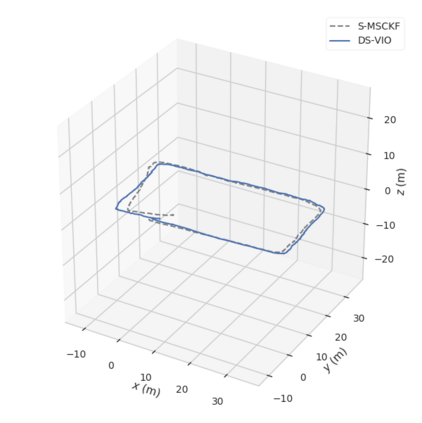
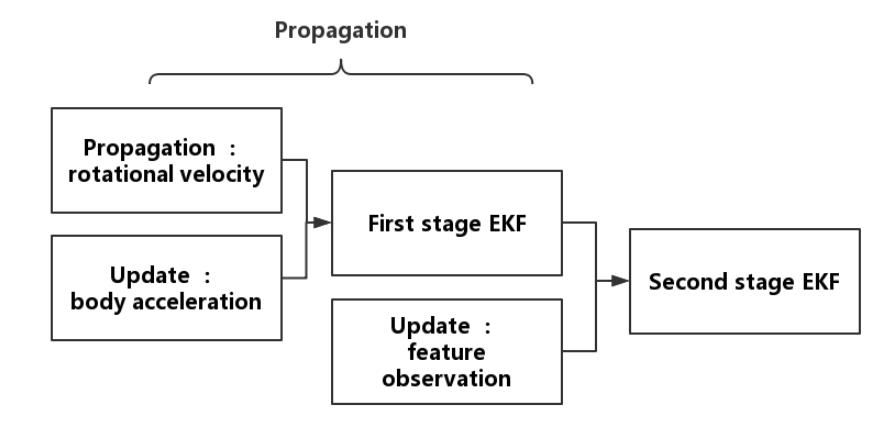
This paper presents a dual stage EKF (Extended Kalman Filter)-based algorithm for the real-time and robust stereo VIO (visual inertial odometry). The first stage of this EKF-based algorithm performs the fusion of accelerometer and gyroscope while the second performs the fusion of stereo camera and IMU. Due to the sufficient complementary characteristics between accelerometer and gyroscope as well as stereo camera and IMU, the dual stage EKF-based algorithm can achieve a high precision of odometry estimations. At the same time, because of the low dimension of state vector in this algorithm, its computational efficiency is comparable to previous filter-based approaches. We call our approach DS-VIO (dual stage EKFbased stereo visual inertial odometry) and evaluate our DSVIO algorithm by comparing it with the state-of-art approaches including OKVIS, ROVIO, VINS-MONO and S-MSCKF on the EuRoC dataset. Results show that our algorithm can achieve comparable or even better performances in terms of the RMS error
翻译:本文介绍了基于实时和稳健立体VIO(视觉惯性度值)的基于双级 EKF(扩展卡尔曼过滤器)的基于实时和稳健立体VIO(视觉惯性度值)的基于双级 EKF(扩展卡尔曼过滤器)的算法。 这个基于EKF的算法的第一阶段进行加速仪和陀螺仪的聚合,而第二个阶段则进行立体照相机和IMU的聚合。由于加速度计和陀螺仪以及立体照相机和IMU之间的充分互补特征,基于双级的基于EKF的算法可以实现高精确度的odoro估计。同时,由于这一算法中状态矢量值的低度,其计算效率与以前基于过滤法的方法相当。我们称我们的方法DS-VIO(基于双级 EKF的立体惯性惯性惯性惯性度值值值值值值度度值),并通过在ECVIS、ROVIO、VINS-MON和S-MSCKF上的最新方法加以比较,来评估我们的DSVIO算算法的算方法。结果显示,我们的算算能够误差或更好的表现。