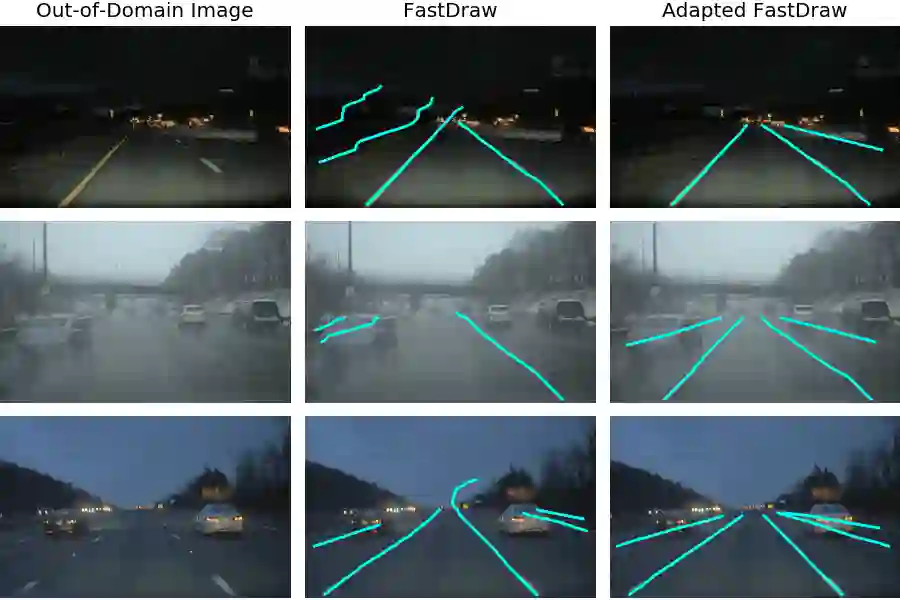
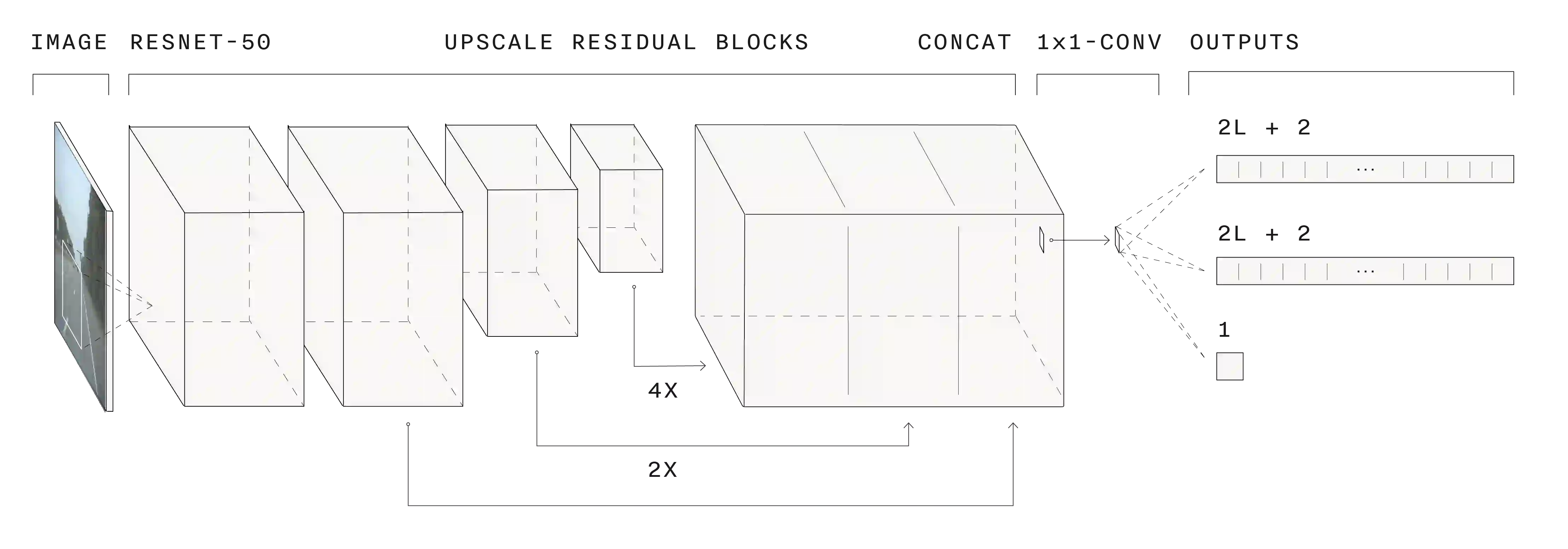
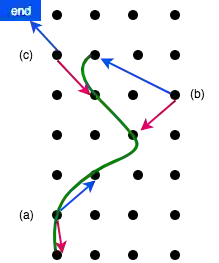
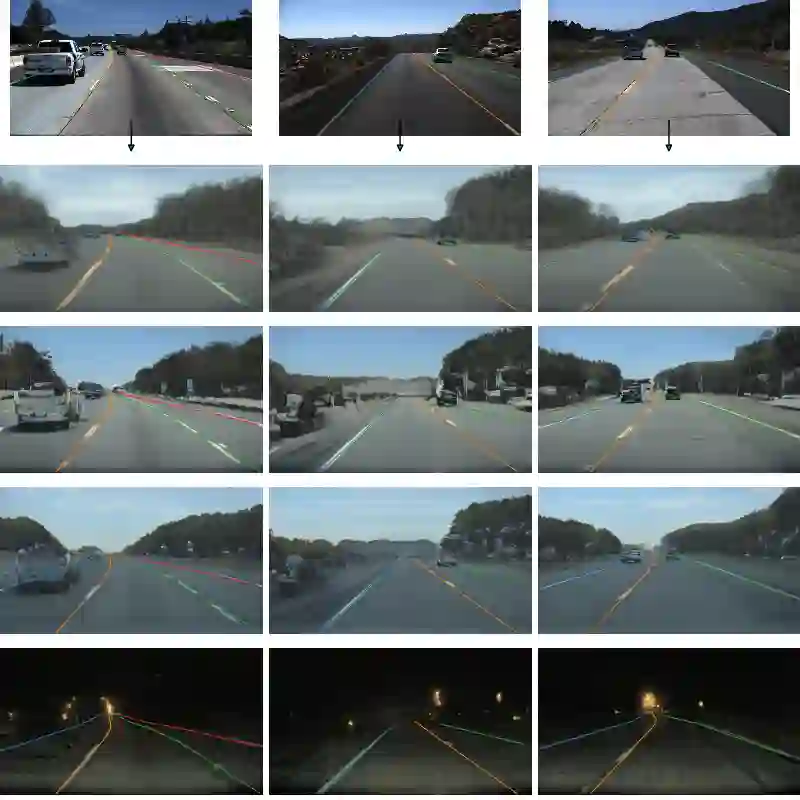
The search for predictive models that generalize to the long tail of sensor inputs is the central difficulty when developing data-driven models for autonomous vehicles. In this paper, we use lane detection to study modeling and training techniques that yield better performance on real world test drives. On the modeling side, we introduce a novel fully convolutional model of lane detection that learns to decode lane structures instead of delegating structure inference to post-processing. In contrast to previous works, our convolutional decoder is able to represent an arbitrary number of lanes per image, preserves the polyline representation of lanes without reducing lanes to polynomials, and draws lanes iteratively without requiring the computational and temporal complexity of recurrent neural networks. Because our model includes an estimate of the joint distribution of neighboring pixels belonging to the same lane, our formulation includes a natural and computationally cheap definition of uncertainty. On the training side, we demonstrate a simple yet effective approach to adapt the model to new environments using unsupervised style transfer. By training FastDraw to make predictions of lane structure that are invariant to low-level stylistic differences between images, we achieve strong performance at test time in weather and lighting conditions that deviate substantially from those of the annotated datasets that are publicly available. We quantitatively evaluate our approach on the CVPR 2017 Tusimple lane marking challenge, difficult CULane datasets, and a small labeled dataset of our own and achieve competitive accuracy while running at 90 FPS.
翻译:在为自动车辆开发数据驱动模型时,寻找与传感器投入长尾部相通的预测模型是核心困难所在。在本文中,我们使用车道探测方法来研究模型和培训技术,从而在现实世界测试驱动器上产生更好的性能。在模型方面,我们引入了一个全新的全演化车道探测模型,该模型学会解码车道结构,而不是将结构推论权下放给后处理。与以前的工作相比,我们的变动解码器能够代表每个图像的任意多行道数量,保存多行道的准确性,而不会减少多行道的车道数量,在不要求经常神经网络的计算和时间复杂性的情况下迭接车道。在模型中,我们对属于同一行道的相邻象群的联合分布进行了估计,这包括自然和计算较低的不确定性定义。在培训方面,我们展示了一种简单而有效的方法,用未经校准的标签风格转换方式使模型适应新的环境。通过训练快速行道对车道结构进行预测,而不会减少多行道至多行道到多行道的行道,也不需要经常性神经网络网络网络网络网络。因为我们的神经网络网络网络网络网络网络网络网络网络网络网络网络网络网络网络,不要求,不要求,不要求经常进行迭交复杂。因为我们的神经路路段段,因为我们对属于同一路段点的轨的轨的轨的轨迹的轨数据进行快速数据测试,同时我们在公开测量测量测量测量测量,我们在公开测量状况上的数据测量测量状况上的数据测量测量测量测量测量度评估。