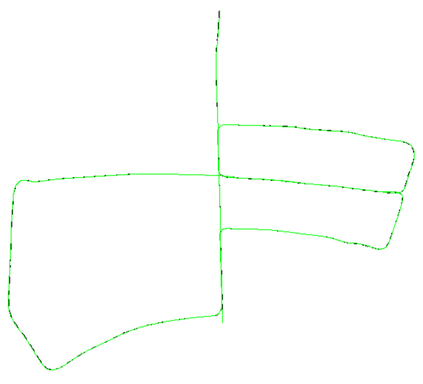
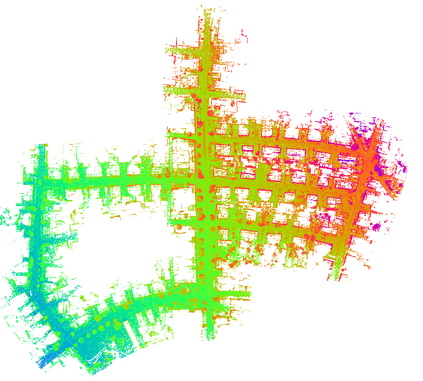
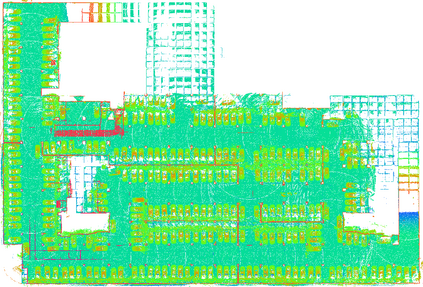
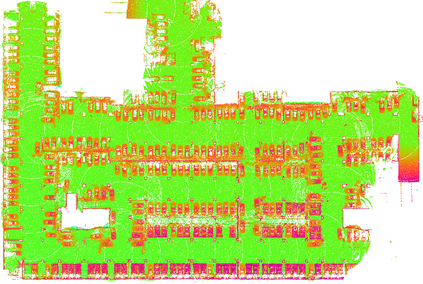
This paper proposes a 3D LiDAR SLAM algorithm named Ground-SLAM, which exploits grounds in structured multi-floor environments to compress the pose drift mainly caused by LiDAR measurement bias. Ground-SLAM is developed based on the well-known pose graph optimization framework. In the front-end, motion estimation is conducted using LiDAR Odometry (LO) with a novel sensor-centric sliding map introduced, which is maintained by filtering out expired features based on the model of error propagation. At each key-frame, the sliding map is recorded as a local map. The ground nearby is extracted and modelled as an infinite planar landmark in the form of Closest Point (CP) parameterization. Then, ground planes observed at different key-frames are associated, and the ground constraints are fused into the pose graph optimization framework to compress the pose drift of LO. Finally, loop-closure detection is carried out, and the residual error is jointly minimized, which could lead to a globally consistent map. Experimental results demonstrate superior performances in the accuracy of the proposed approach.
翻译:本文提出3D LiDAR SLAM 算法,名为 Ground-SLAM,该算法利用结构化多层环境中的地面压缩主要由LIDAR测量偏差造成的表面漂移。地面SLAM是根据众所周知的表面图形优化框架开发的。在前端,运动估计使用LIDAR Odograph (LO) 进行,采用新的传感器中心滑动地图进行,根据错误传播模型过滤过期的特征来维持。在每个键盘中,滑动地图被记录为当地地图。附近地面被提取并模拟成一个无穷的平面标志,以Cloeest Point (CP) 参数化为形式。随后,在不同关键框架观测的地面平面被连接在一起,地面限制被结合到形状优化框架,以压缩LO的表面漂移。最后,进行双圈探测,并将剩余错误联合最小化,这可能导致绘制一个全球一致的地图。实验结果显示,拟议方法的准确性表现优劣。