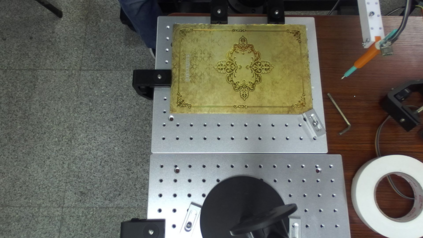
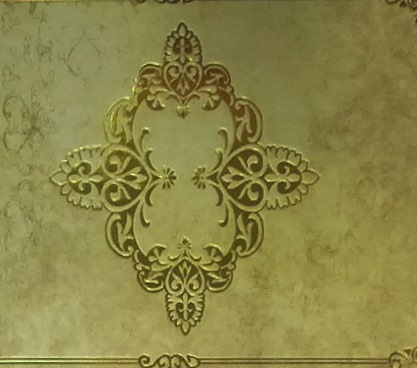
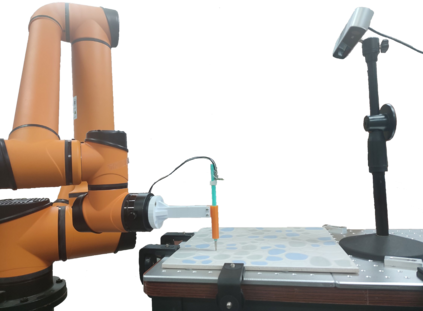
With the development of VR technology, especially the emergence of the metaverse concept, the integration of visual and tactile perception has become an expected experience in human-machine interaction. Therefore, achieving spatial-temporal consistency of visual and tactile information in VR applications has become a necessary factor for realizing this experience. The state-of-the-art vibrotactile datasets generally contain temporal-level vibrotactile information collected by randomly sliding on the surface of an object, along with the corresponding image of the material/texture. However, they lack the position/spatial information that corresponds to the signal acquisition, making it difficult to achieve spatiotemporal alignment of visual-tactile data. Therefore, we develop a new data acquisition system in this paper which can collect visual and vibrotactile signals of different textures/materials with spatial and temporal consistency. In addition, we develop a VR-based application call "V-Touching" by leveraging the dataset generated by the new acquisition system, which can provide pixel-to-taxel joint visual-tactile perception when sliding over the surface of objects in the virtual environment with distinct vibrotactile feedback of different textures/materials.
翻译:暂无翻译