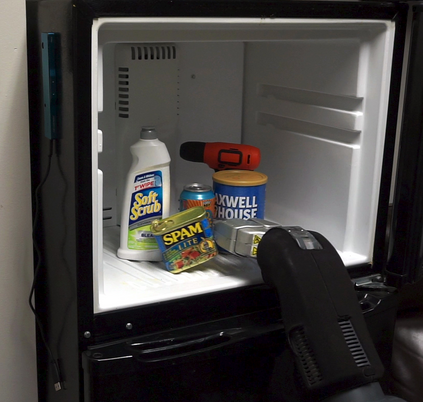
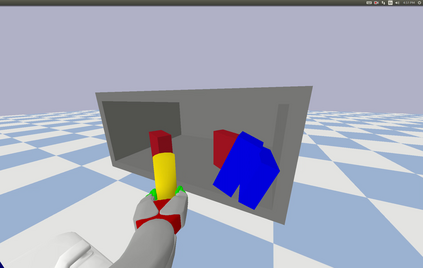
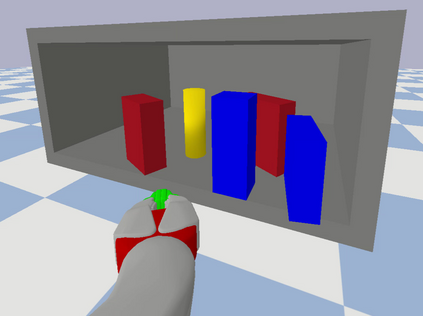
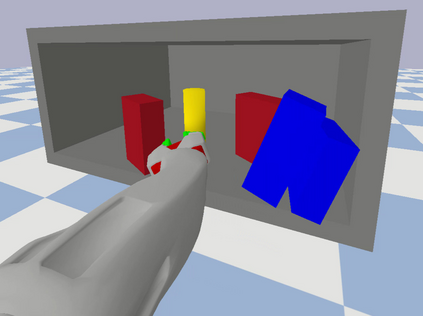
Real-world manipulation problems in heavy clutter require robots to reason about potential contacts with objects in the environment. We focus on pick-and-place style tasks to retrieve a target object from a shelf where some `movable' objects must be rearranged in order to solve the task. In particular, our motivation is to allow the robot to reason over and consider non-prehensile rearrangement actions that lead to complex robot-object and object-object interactions where multiple objects might be moved by the robot simultaneously, and objects might tilt, lean on each other, or topple. To support this, we query a physics-based simulator to forward simulate these interaction dynamics which makes action evaluation during planning computationally very expensive. To make the planner tractable, we establish a connection between the domain of Manipulation Among Movable Objects and Multi-Agent Pathfinding that lets us decompose the problem into two phases our M4M algorithm iterates over. First we solve a multi-agent planning problem that reasons about the configurations of movable objects but does not forward simulate a physics model. Next, an arm motion planning problem is solved that uses a physics-based simulator but does not search over possible configurations of movable objects. We run simulated and real-world experiments with the PR2 robot and compare against relevant baseline algorithms. Our results highlight that M4M generates complex 3D interactions, and solves at least twice as many problems as the baselines with competitive performance.
翻译:在密集的乱堆中进行实际操纵需要机器人考虑与环境物品的潜在接触。我们专注于拾取和放置式任务,从架子上取回目标物体,其中必须重新排列一些“可移动”的物体才能解决任务。特别是,我们的动机是允许机器人对可能导致复杂的机器人-物体和物体-物体相互作用的非抓取重新排列动作进行推理,其中机器人可能同时移动多个物体,物体可能倾斜,在彼此之间倾斜或倾倒。为了支持这一点,我们查询基于物理的模拟器以向前模拟这些交互动力学,这使得规划过程中的动作评估计算非常昂贵。为了使计划器可行,我们在可操纵可移动物体的领域和多智能体路径规划之间建立了联系,使我们将问题分解为M4M算法迭代的两个阶段。首先,我们解决一个多智能体规划问题,该问题考虑了可移动物体的配置但没有向前模拟物理模型。接下来,解决了一个使用基于物理的模拟器的臂测运动规划问题,但没有搜索可移动物体的可能配置。我们在PR2机器人上进行了模拟和实际实验,并与相关基线算法进行了比较。我们的结果突显了M4M生成复杂的3D交互,并解决了至少两倍于基线的问题,但具有竞争性能。