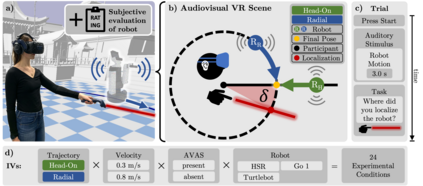
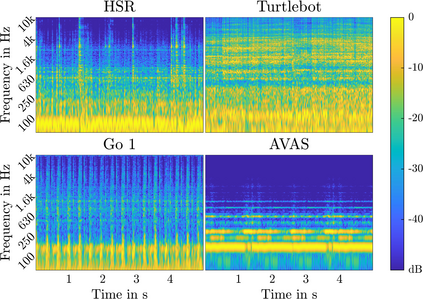
Mobile robots increasingly operate alongside humans but are often out of sight, so that humans need to rely on the sounds of the robots to recognize their presence. For successful human-robot interaction (HRI), it is therefore crucial to understand how humans perceive robots by their consequential sounds, i.e., operating noise. Prior research suggests that the sound of a quadruped Go1 is more detectable than that of a wheeled Turtlebot. This study builds on this and examines the human ability to localize consequential sounds of three robots (quadruped Go1, wheeled Turtlebot 2i, wheeled HSR) in Virtual Reality. In a within-subjects design, we assessed participants' localization performance for the robots with and without an acoustic vehicle alerting system (AVAS) for two velocities (0.3, 0.8 m/s) and two trajectories (head-on, radial). In each trial, participants were presented with the sound of a moving robot for 3~s and were tasked to point at its final position (localization task). Localization errors were measured as the absolute angular difference between the participants' estimated and the actual robot position. Results showed that the robot type significantly influenced the localization accuracy and precision, with the sound of the wheeled HSR (especially without AVAS) performing worst under all experimental conditions. Surprisingly, participants rated the HSR sound as more positive, less annoying, and more trustworthy than the Turtlebot and Go1 sound. This reveals a tension between subjective evaluation and objective auditory localization performance. Our findings highlight consequential robot sounds as a critical factor for designing intuitive and effective HRI, with implications for human-centered robot design and social navigation.
翻译:暂无翻译