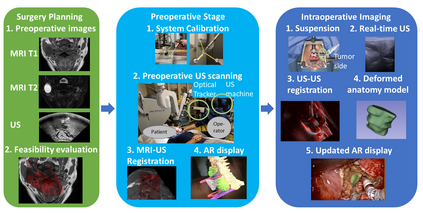
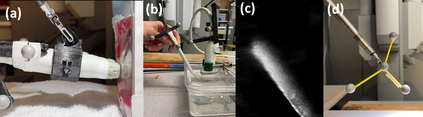
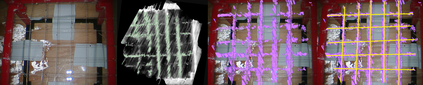
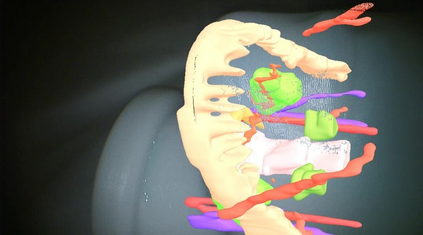
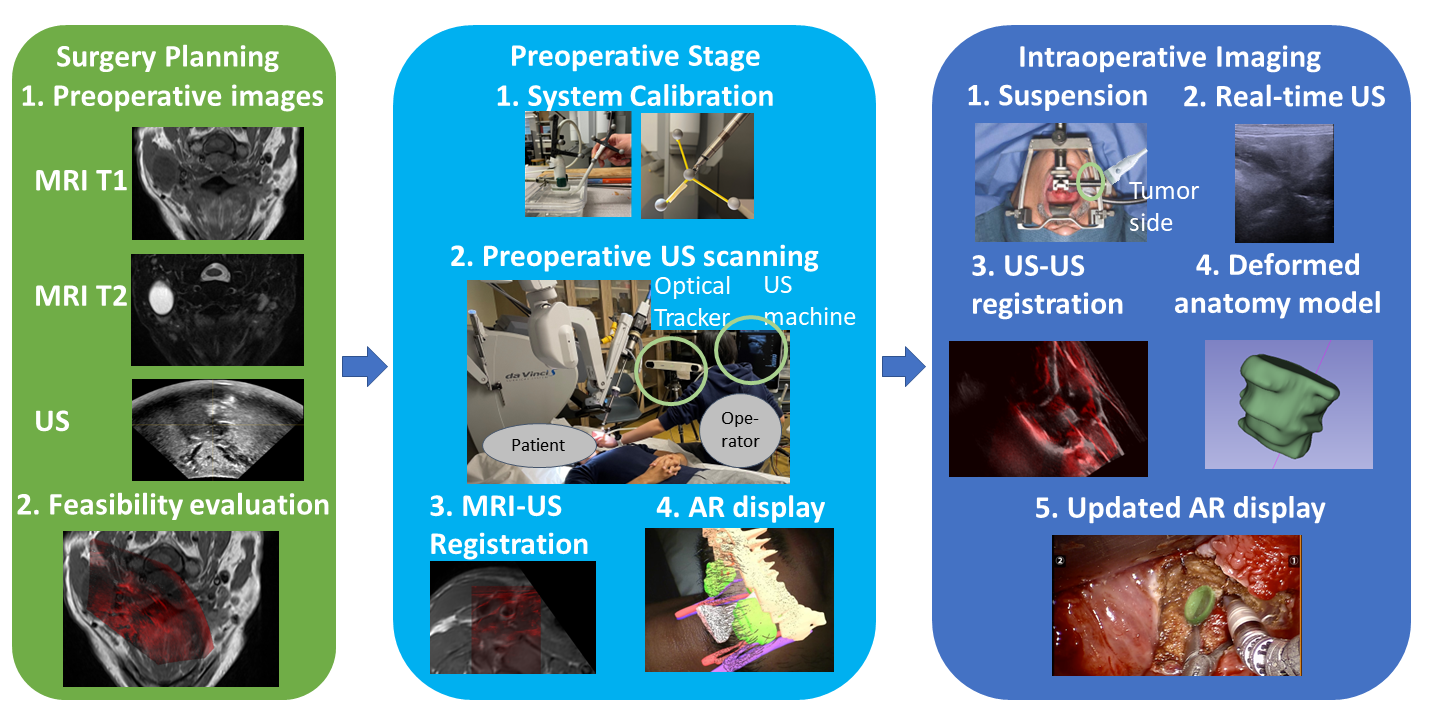
Purpose: Trans-oral robotic surgery (TORS) using the da Vinci surgical robot is a new minimally-invasive surgery method to treat oropharyngeal tumors, but it is a challenging operation. Augmented reality (AR) based on intra-operative ultrasound (US) has the potential to enhance the visualization of the anatomy and cancerous tumors to provide additional tools for decision-making in surgery. Methods: We propose and carry out preliminary evaluations of a US-guided AR system for TORS, with the transducer placed on the neck for a transcervical view. Firstly, we perform a novel MRI-transcervical 3D US registration study. Secondly, we develop a US-robot calibration method with an optical tracker and an AR system to display the anatomy mesh model in the real-time endoscope images inside the surgeon console. Results: Our AR system reaches a mean projection error of 26.81 and 27.85 pixels for the projection from the US to stereo cameras in a water bath experiment. The average target registration error for MRI to 3D US is 8.90 mm for the 3D US transducer and 5.85 mm for freehand 3D US, and the average distance between the vessel centerlines is 2.32 mm. Conclusion: We demonstrate the first proof-of-concept transcervical US-guided AR system for TORS and the feasibility of trans-cervical 3D US-MRI registration. Our results show that trans-cervical 3D US is a promising technique for TORS image guidance.
翻译:目的:移植基于术中超声的增强现实技术(AR)于经口腔机器人手术(TORS)能够提高手术的可视化效果和决策辅助。我们使用经颈道超声图像引导AR系统为TORS提供辅助,以提高手术安全和手术质量。方法:我们运用医学影像技术开发一种基于经颈道超声图像的AR系统,并进行MRI-transcervical 3D US配准,开发超声机-机器人校准方法以实时显示解剖模型。结果:我们的AR系统在水箱实验中平均投影误差为26.81和27.85像素。MRI到3D US的平均目标配准误差为8.90mm,手动3D US为5.85mm,管道中心线的平均距离为2.32mm。结论:我们证明了经颈道超声引导AR系统是TORS的一种有前景的图像引导技术,并且证明了经颈道超声诊断是TORS图像引导的可行技术。