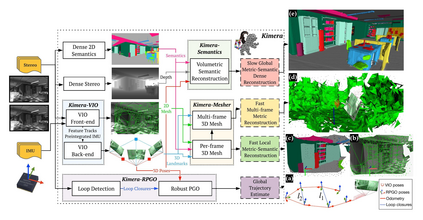
We provide an open-source C++ library for real-time metric-semantic visual-inertial Simultaneous Localization And Mapping (SLAM). The library goes beyond existing visual and visual-inertial SLAM libraries (e.g., ORB-SLAM, VINS- Mono, OKVIS, ROVIO) by enabling mesh reconstruction and semantic labeling in 3D. Kimera is designed with modularity in mind and has four key components: a visual-inertial odometry (VIO) module for fast and accurate state estimation, a robust pose graph optimizer for global trajectory estimation, a lightweight 3D mesher module for fast mesh reconstruction, and a dense 3D metric-semantic reconstruction module. The modules can be run in isolation or in combination, hence Kimera can easily fall back to a state-of-the-art VIO or a full SLAM system. Kimera runs in real-time on a CPU and produces a 3D metric-semantic mesh from semantically labeled images, which can be obtained by modern deep learning methods. We hope that the flexibility, computational efficiency, robustness, and accuracy afforded by Kimera will build a solid basis for future metric-semantic SLAM and perception research, and will allow researchers across multiple areas (e.g., VIO, SLAM, 3D reconstruction, segmentation) to benchmark and prototype their own efforts without having to start from scratch.
翻译:我们提供了一个开放源代码 C++ 库库,用于实时的光学光学和光学模拟本地化和绘图(SLAM) 。 图书馆超越了现有的视觉和光学SLAM图书馆(例如ORB-SLAM、VINS-Mono、OKVIS、ROVIO),使Mesh重建和语义标签在3D中得以运行。 Kimera在设计上具有模块性,有4个关键组成部分:用于快速和准确的国家估计的视觉-内脏测量模型(VIO),一个用于全球轨迹估计的坚固图形优化器,一个用于快速网状重建的轻度 3D mesher 模块,以及一个密集的 3D 光度的光度SLM 图书馆(例如ORB-SLAM、VINS-M-MO ) 。 这些模块可以孤立或组合运行,因此Kimera可以很容易地回到一个最先进的VIO或完整的SLM系统。 Kimera在CP上实时运行并制作一个3D- meman-man-man-mantistrattical mist mess 图像的模型, 。 通过现代深度的精确的精确的精确的精确的模型, 和模型,我们希望的模型, 我们希望通过一个坚实的精确的精确的模型的模型的模型的模型的模型, 将可以建立, 3- 3- brodealal-tobildal-toal-toal-toal-toal-tobil-toal-tobil-toal-toal-toal-totional-toal-tocal-tocal-tocal-sal-tocal-tocal-st-tocal-st-tocal-todal-todal-tocal-stal-sal-todal-todal-todal-toal-toal-toal-toal-toal-toal-toal-toal-toal-toal-tod-toal-toal-toal-s-s-sal-sal-tom-sal-sal-toil-toal-toal-toal-toal-toal-toal-toal-to