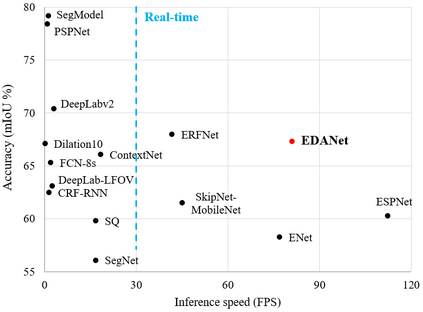
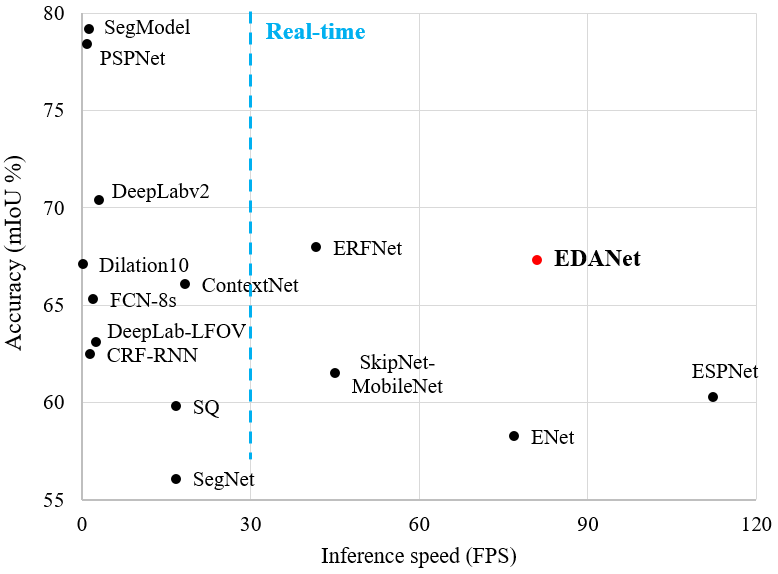
Real-time semantic segmentation plays an important role in practical applications such as self-driving and robots. Most research working on semantic segmentation focuses on accuracy with little consideration for efficiency. Several existing studies that emphasize high-speed inference often cannot produce high-accuracy segmentation results. In this paper, we propose a novel convolutional network named Efficient Dense modules with Asymmetric convolution (EDANet), which employs an asymmetric convolution structure incorporating the dilated convolution and the dense connectivity to attain high efficiency at low computational cost, inference time, and model size. Compared to FCN, EDANet is 11 times faster and has 196 times fewer parameters, while it achieves a higher the mean of intersection-over-union (mIoU) score without any additional decoder structure, context module, post-processing scheme, and pretrained model. We evaluate EDANet on Cityscapes and CamVid datasets to evaluate its performance and compare it with the other state-of-art systems. Our network can run on resolution 512x1024 inputs at the speed of 108 and 81 frames per second on a single GTX 1080Ti and Titan X, respectively.
翻译:在自驾驶和机器人等实际应用中,实时语义分解具有重要作用。大多数关于语义分解的研究大多侧重于精度,很少考虑效率。一些强调高速推断的现有研究往往不能产生高精度分解结果。在本文中,我们提议建立一个名为高效常量模块的新型共变网络,使用非对称演动(EDANet),使用包含变相和密集连通的不对称卷变结构,以低计算成本、误判时间和模型大小达到高效率。与FCN相比,Edanaet更快11倍,比参数少196倍,同时在不增加脱coder结构、上下文模块、后处理计划和预培训模型的情况下,实现更高的交叉重叠组合(MIOU)平均分数。我们评价城市景和CamVid数据集的EDANet,以评价其性能,并将其与其他州级系统进行比较。我们的网络可以运行第512x1024号决议,每10xxxxxxxxxxxxxxxxxxxxxxxxxxxxx10xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx10xxxxxxxxxxxxxxxxxxxxxxxxxx10xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx10xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx