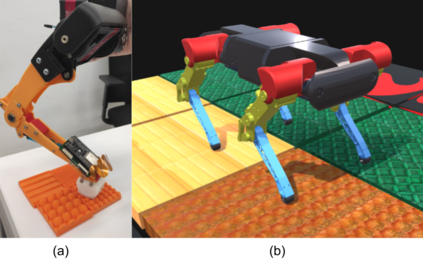
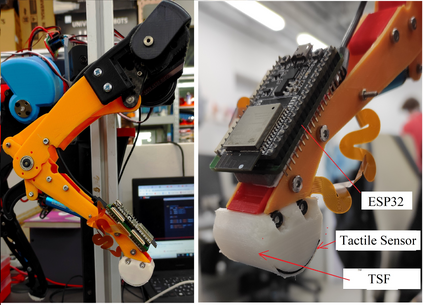
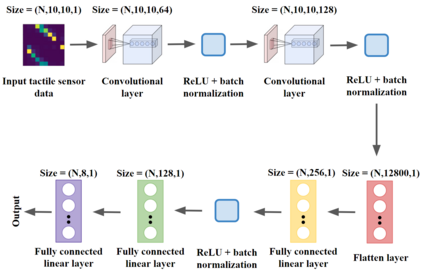
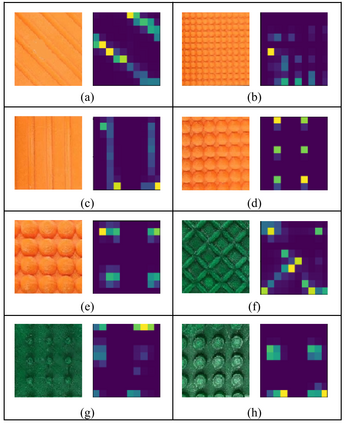
The ability to perform locomotion in various terrains is critical for legged robots. However, the robot has to have a better understanding of the surface it is walking on to perform robust locomotion on different terrains. Animals and humans are able to recognize the surface with the help of the tactile sensation on their feet. Although, the foot tactile sensation for legged robots has not been much explored. This paper presents research on a novel quadruped robot DogTouch with tactile sensing feet (TSF). TSF allows the recognition of different surface textures utilizing a tactile sensor and a convolutional neural network (CNN). The experimental results show a sufficient validation accuracy of 74.37\% for our trained CNN-based model, with the highest recognition for line patterns of 90\%. In the future, we plan to improve the prediction model by presenting surface samples with the various depths of patterns and applying advanced Deep Learning and Shallow learning models for surface recognition. Additionally, we propose a novel approach to navigation of quadruped and legged robots. We can arrange the tactile paving textured surface (similar that used for blind or visually impaired people). Thus, DogTouch will be capable of locomotion in unknown environment by just recognizing the specific tactile patterns which will indicate the straight path, left or right turn, pedestrian crossing, road, and etc. That will allow robust navigation regardless of lighting condition. Future quadruped robots equipped with visual and tactile perception system will be able to safely and intelligently navigate and interact in the unstructured indoor and outdoor environment.
翻译:在不同地形中执行动脉动的能力对于脚步机器人来说至关重要。 然而, 机器人必须更好地了解它所行走的表面, 以便在不同的地形上执行稳健的直观神经网络( CNN) 。 动物和人类在触动感的帮助下, 能够识别表面。 虽然在脚部的触觉中, 脚部对脚部机械腿部的触动感没有进行很多探索。 本文展示了对一个四倍的新型机器人DogTouch的研究, 并带有触摸感知脚( TSF ) 。 TSF 能够通过一个触摸感知感知到不同表面的地面纹质传感器和直径直线神经网络( CNN ) 。 实验结果显示我们所训练的CNN型模型的验证准确度是74.37 。 对90 的线形感知度最高。 我们计划改进预测模型, 通过展示各种深度的表层样本, 应用先进的深学习和浅浅浅度学习模型进行表面识别。 此外, 我们提议一种创新的导航和脚部机器人的智能感知觉感知觉感知觉感知力方法。 我们可以将让感知更深地路路路, 路路路路、 感知和感知、 感知、 感知、 路路路路路路路路路路路、 路路路、 路路路路、感知和感知、 感知、 路路、感知、 路路路路路路路、感知路、 路路路路路、感会、感知、感知路、感知、感、感、感知、感、感知路、感、感知、感知路、感知路、感、感知、感知路、感知路、感知路、感知路、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感、感知、感知、感、感、感、感、感、感、感、感