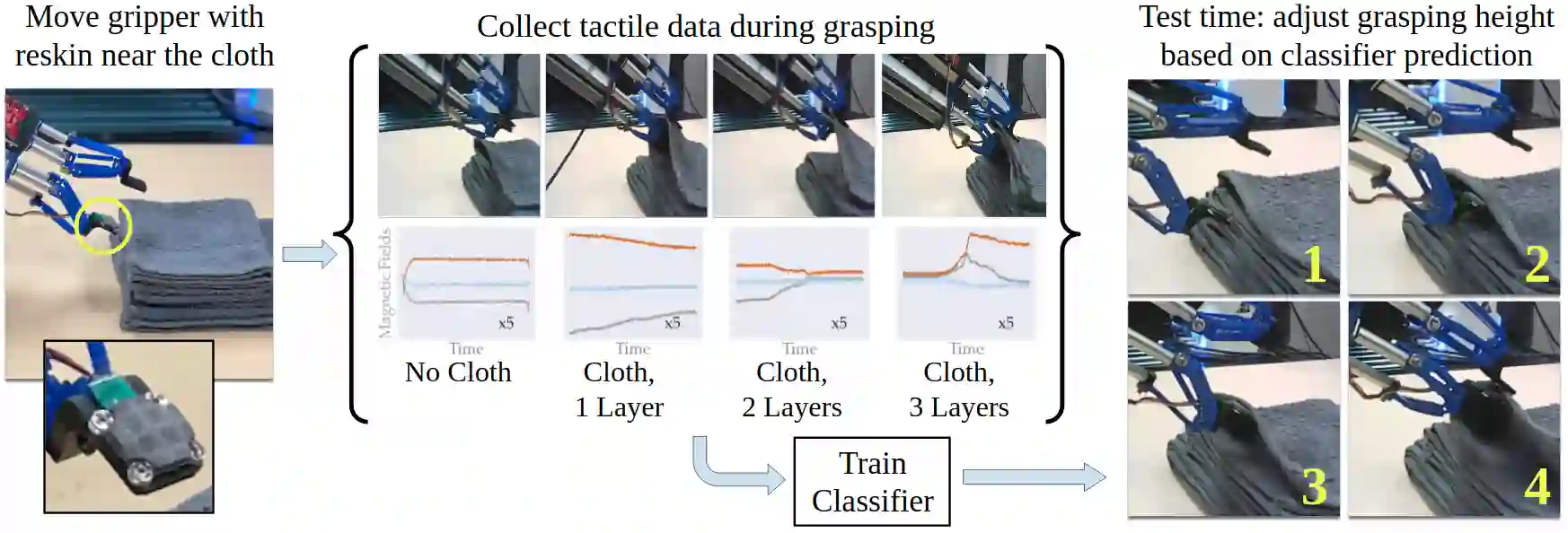
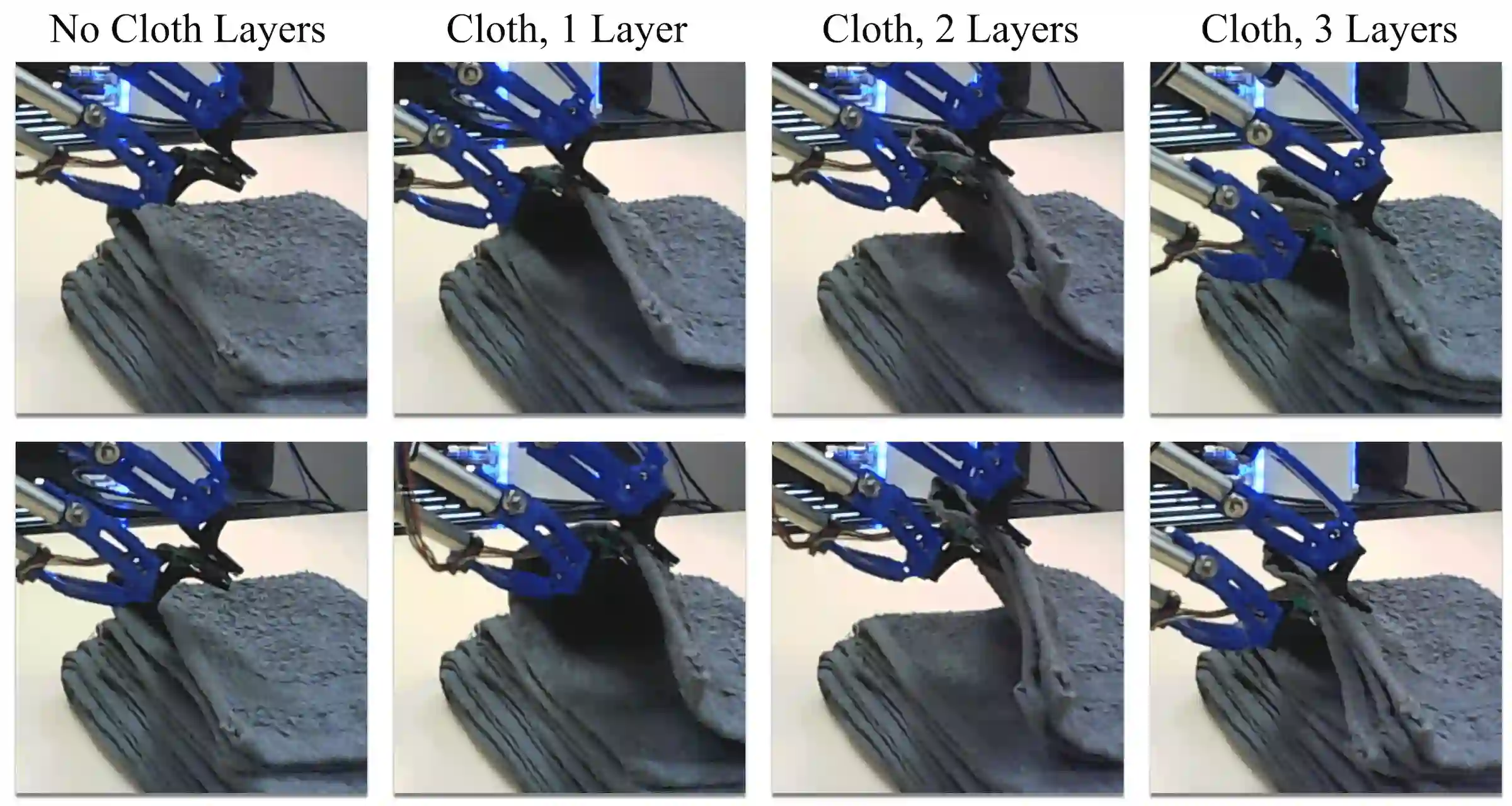
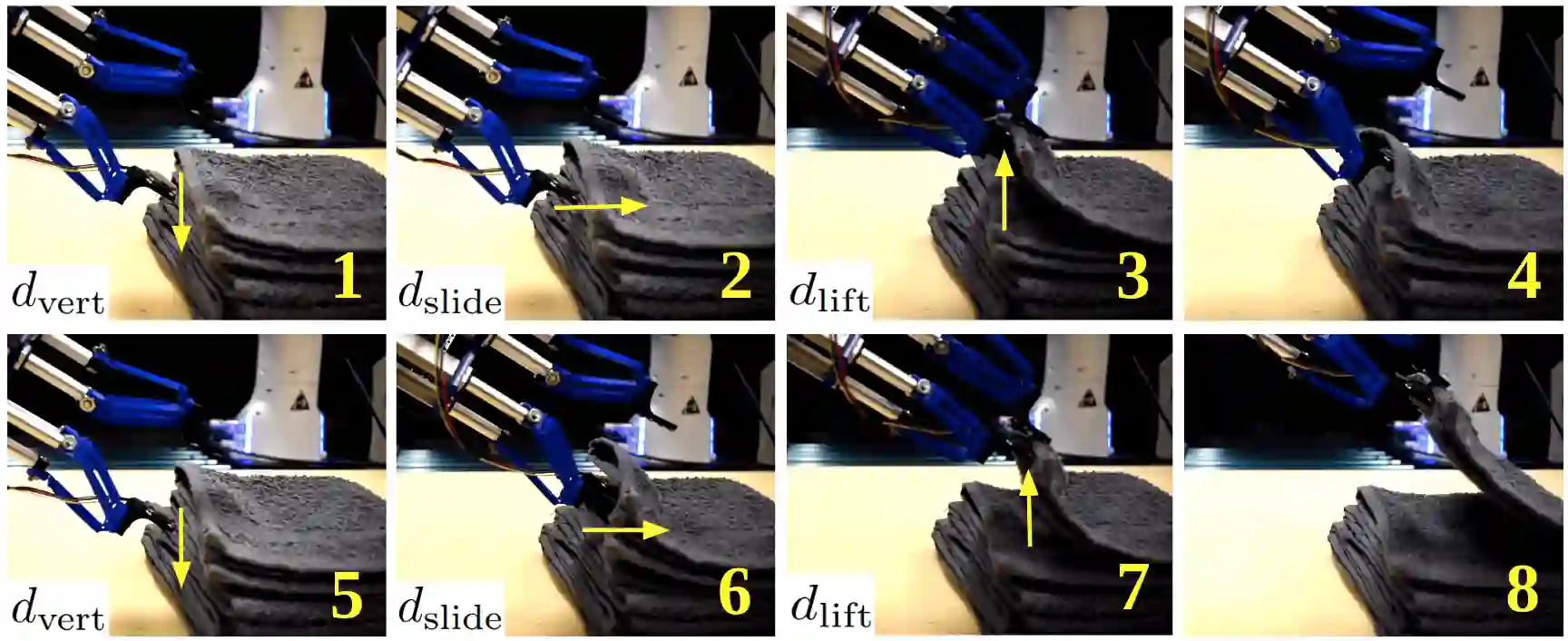
Robotic manipulation of cloth has applications ranging from fabrics manufacturing to handling blankets and laundry. Cloth manipulation is challenging for robots largely due to their high degrees of freedom, complex dynamics, and severe self-occlusions when in folded or crumpled configurations. Prior work on robotic manipulation of cloth relies primarily on vision sensors alone, which may pose challenges for fine-grained manipulation tasks such as grasping a desired number of cloth layers from a stack of cloth. In this paper, we propose to use tactile sensing for cloth manipulation; we attach a tactile sensor (ReSkin) to one of the two fingertips of a Franka robot and train a classifier to determine whether the robot is grasping a specific number of cloth layers. During test-time experiments, the robot uses this classifier as part of its policy to grasp one or two cloth layers using tactile feedback to determine suitable grasping points. Experimental results over 180 physical trials suggest that the proposed method outperforms baselines that do not use tactile feedback and has better generalization to unseen cloth compared to methods that use image classifiers. Code, data, and videos are available at https://sites.google.com/view/reskin-cloth.
翻译:木布的机械操控具有从制造布料到处理毯子和洗衣等各种应用。 木布的操控对机器人具有挑战性, 主要是因为机器人在折叠或折叠的配置中拥有高度的自由、 复杂的动态和严格的自我隔离。 之前的布的机械操控工作主要依靠视觉传感器, 这可能会对细微的操控任务构成挑战, 例如从堆叠的布中获取所需数量的布层。 在本文中, 我们提议使用触摸感应进行布控操作; 我们将触摸感应器( Rekin) 附加在Franka机器人的两个指尖中, 并训练一个分类器, 以确定机器人是否掌握了特定的布层。 在测试时, 机器人将这一分类作为其政策的一部分, 用触摸反馈来掌握一两个布层, 以确定合适的抓取点。 实验结果超过 180 物理试验表明, 拟议的方法比不使用触摸回的基线, 并且比使用图像分析器/ httpsco, 数据、 视频和视频在使用图像分类/sglegleglegles/coms 。