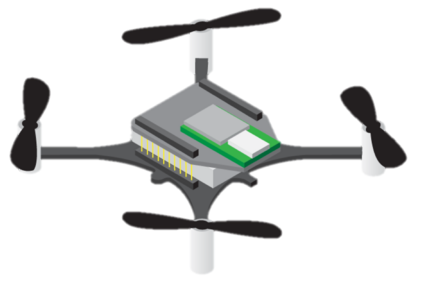
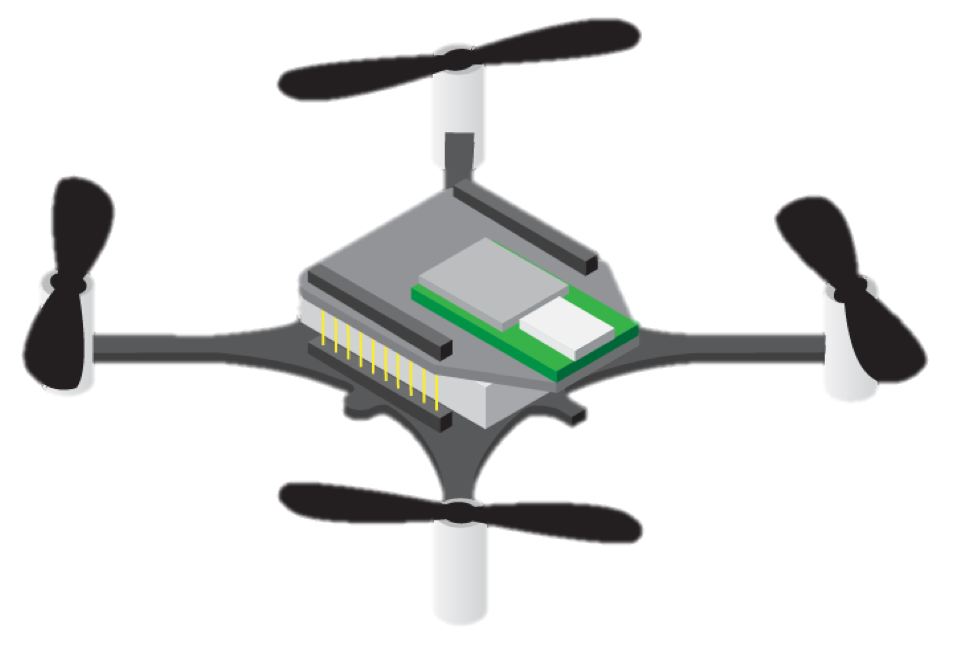
Accurate indoor localization is a crucial enabling technology for many robotics applications, from warehouse management to monitoring tasks. Ultra-wideband (UWB) time difference of arrival (TDOA)-based localization is a promising lightweight, low-cost solution that can scale to a large number of devices -- making it especially suited for resource-constrained multi-robot applications. However, the localization accuracy of standard, commercially available UWB radios is often insufficient due to significant measurement bias and outliers. In this letter, we address these issues by proposing a robust UWB TDOA localization framework comprising of (i) learning-based bias correction and (ii) M-estimation-based robust filtering to handle outliers. The key properties of our approach are that (i) the learned biases generalize to different UWB anchor setups and (ii) the approach is computationally efficient enough to run on resource-constrained hardware. We demonstrate our approach on a Crazyflie nano-quadcopter. Experimental results show that the proposed localization framework, relying only on the onboard IMU and UWB, provides an average of 42.08 percent localization error reduction (in three different anchor setups) compared to the baseline approach without bias compensation. {We also show autonomous trajectory tracking on a quadcopter using our UWB TDOA localization approach.}
翻译:准确的室内本地化对于许多机器人应用,从仓库管理到监测任务,是一个至关重要的扶持技术,从仓库管理到监测任务。超广域网(UWB)抵达时间差(TDOA)基于本地化是一个很有希望的轻量、低成本的解决方案,可以推广到大量的装置,使它特别适合资源限制的多机器人应用程序。然而,由于测量偏差和外差的显著偏差,在商业上可得到的UWB无线电台的标准本地化的准确性往往不足。在本信里,我们通过提出一个强大的UWB TDOA本地化框架来解决这些问题,其中包括(一) 学习性的偏差纠正和(二) 以MEDA为基础的稳健过滤,以便处理外端。我们的方法的主要特性是:(一) 学到的偏差适用于UNWB的不同固定固定装置,以及(二) 这种方法在计算上效率足以运行资源限制的硬件。我们展示了我们关于疯狂的Num-qucopopter方法的方法。实验结果显示,拟议的本地化框架仅依靠机上基于基于学习的偏差校正校正校正的校正方法, 也提供了一种不差级平平平平平平平差的平差的递减。