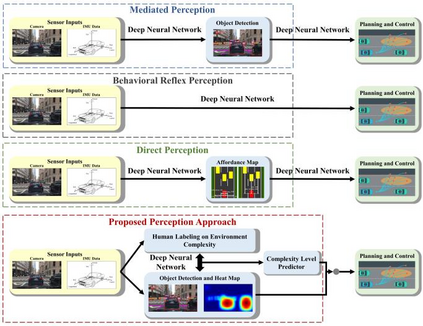
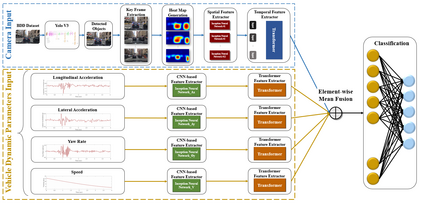
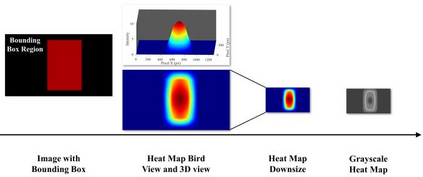
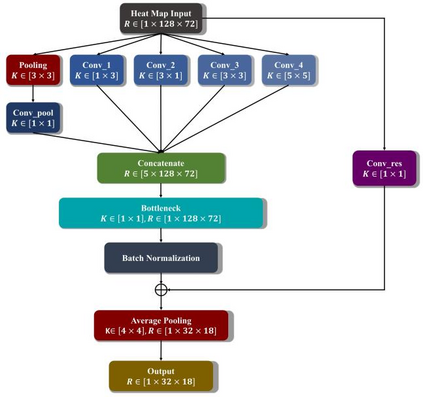
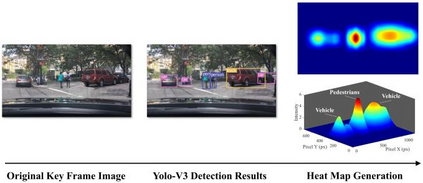
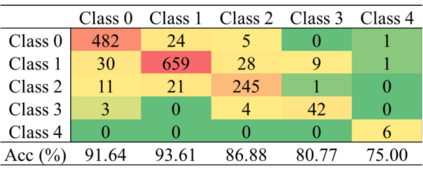
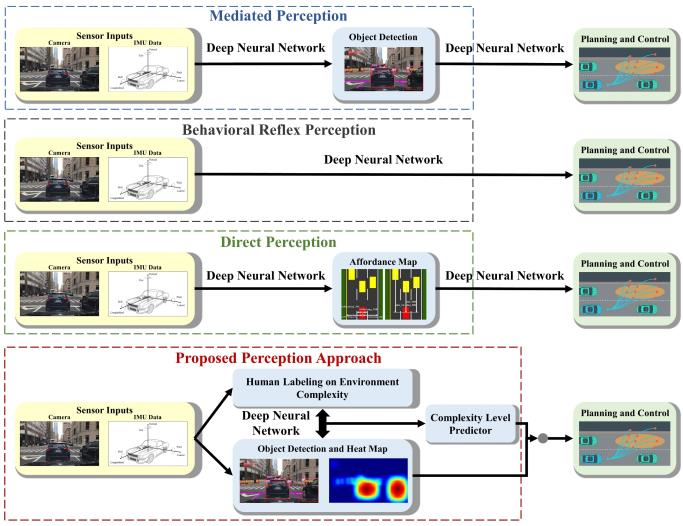
Environment perception is crucial for autonomous vehicle (AV) safety. Most existing AV perception algorithms have not studied the surrounding environment complexity and failed to include the environment complexity parameter. This paper proposes a novel attention-based neural network model to predict the complexity level of the surrounding driving environment. The proposed model takes naturalistic driving videos and corresponding vehicle dynamics parameters as input. It consists of a Yolo-v3 object detection algorithm, a heat map generation algorithm, CNN-based feature extractors, and attention-based feature extractors for both video and time-series vehicle dynamics data inputs to extract features. The output from the proposed algorithm is a surrounding environment complexity parameter. The Berkeley DeepDrive dataset (BDD Dataset) and subjectively labeled surrounding environment complexity levels are used for model training and validation to evaluate the algorithm. The proposed attention-based network achieves 91.22% average classification accuracy to classify the surrounding environment complexity. It proves that the environment complexity level can be accurately predicted and applied for future AVs' environment perception studies.
翻译:环境感知是自控飞行器(AV)安全的关键。 大部分现有的 AV 感知算法没有研究周围环境的复杂性,也没有包括环境复杂性参数。 本文提出一个新的关注型神经网络模型, 以预测周围驾驶环境的复杂性。 拟议的模型使用自然驱动视频和相应的车辆动态参数作为输入。 它包括Yolo- v3天体探测算法、 热图生成算法、 以CNN为基础的地物提取法, 以及视频和时间序列车辆动态数据输入的以关注为基础的特征提取器, 以提取特征。 拟议的算法的输出是一个环绕环境复杂性参数。 伯克利深磁数据集(BDD数据集)和主观标签周围环境复杂程度被用于模型培训和验证,以评估算法。 拟议的关注型网络达到91. 22%的平均分类精度, 以对周围环境的复杂性进行分类。 它证明环境复杂性水平可以准确预测, 并应用于未来的 AVs 环境认知研究。