
论文题目: A Review of Visual Trackers and Analysis of its Application to Mobile Robot
论文摘要: 近年来,计算机视觉受到了极大的关注,这是机器人获取外部环境信息的重要部分之一。视觉跟踪器可以为移动机器人提供必要的物理和环境参数,其性能与机器人的实际应用有关。这项研究提供了有关视觉跟踪器的全面调查。在简要介绍之后,我们首先分析了视觉跟踪器的基本框架和难点。然后介绍了生成方法和判别方法的结构,并总结了跟踪器中使用的特征描述符,建模方法和学习方法。后来,我们从三个方向审查并评估了判别式跟踪器的最新进展:相关滤波器,深度学习和卷积特征。最后,分析了移动机器人视觉跟踪器的研究方向,并概述了移动机器人视觉跟踪器的未来趋势。
成为VIP会员查看完整内容
相关内容

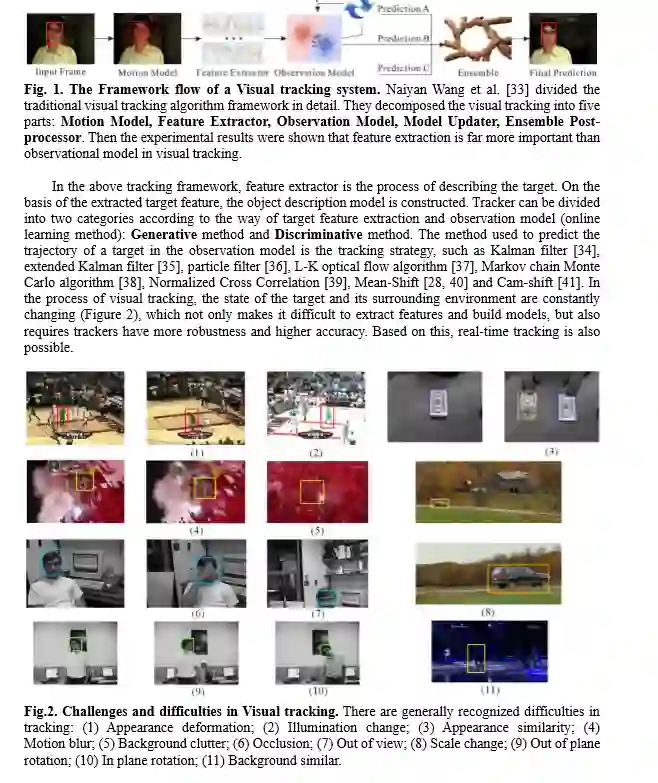
标跟踪是指:给出目标在跟踪视频第一帧中的初始状态(如位置,尺寸),自动估计目标物体在后续帧中的状态。
目标跟踪分为单目标跟踪和多目标跟踪。
人眼可以比较轻松的在一段时间内跟住某个特定目标。但是对机器而言,这一任务并不简单,尤其是跟踪过程中会出现目标发生剧烈形变、被其他目标遮挡或出现相似物体干扰等等各种复杂的情况。过去几十年以来,目标跟踪的研究取得了长足的发展,尤其是各种机器学习算法被引入以来,目标跟踪算法呈现百花齐放的态势。2013年以来,深度学习方法开始在目标跟踪领域展露头脚,并逐渐在性能上超越传统方法,取得巨大的突破。
专知会员服务
58+阅读 · 2019年12月2日
专知会员服务
93+阅读 · 2019年11月15日
Arxiv
4+阅读 · 2019年8月27日
相关主题



相关VIP内容
专知会员服务
58+阅读 · 2019年12月2日
专知会员服务
93+阅读 · 2019年11月15日
相关资讯
相关论文
Arxiv
4+阅读 · 2019年8月27日