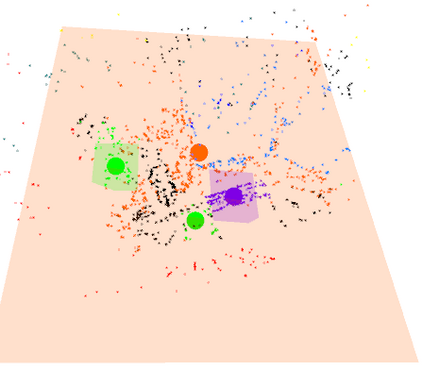
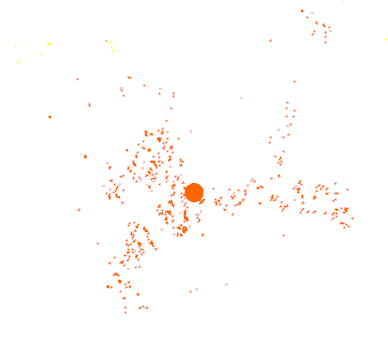
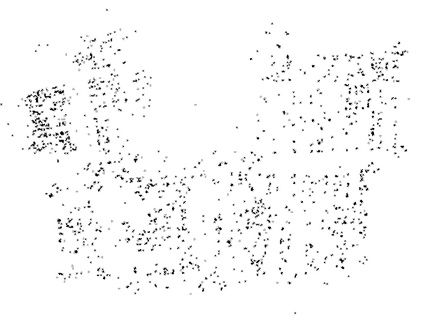
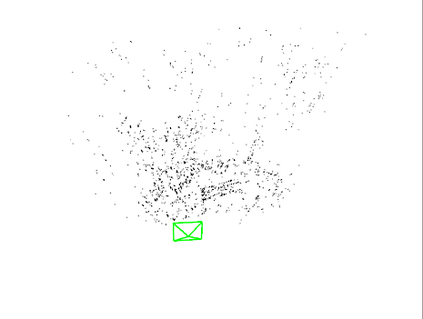
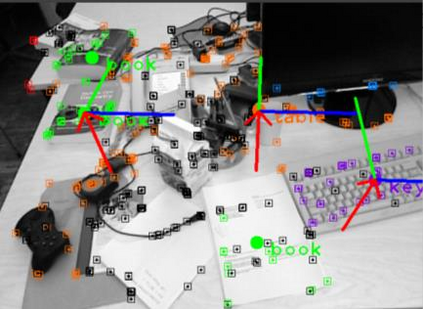
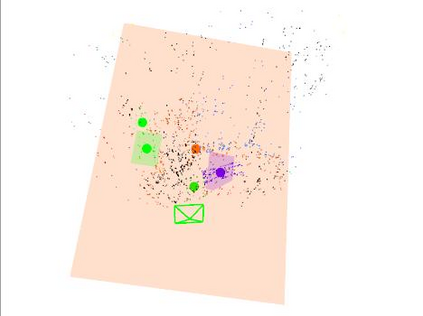
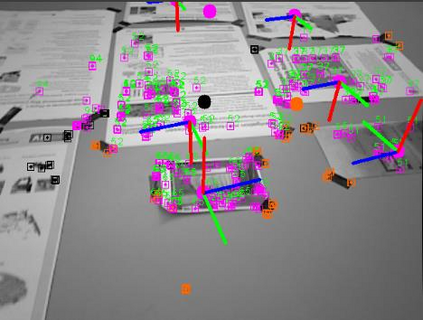
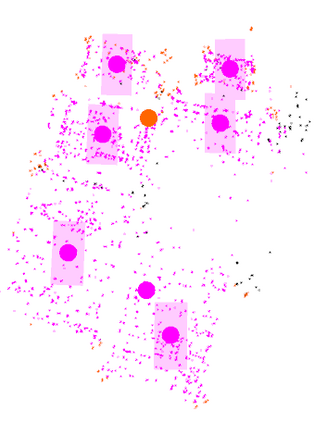
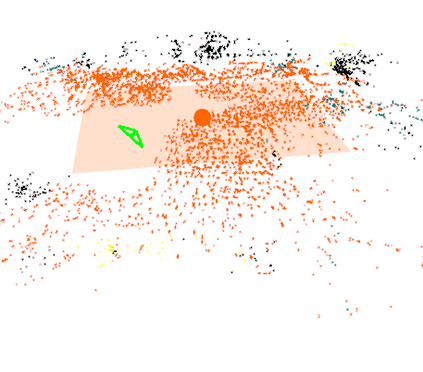
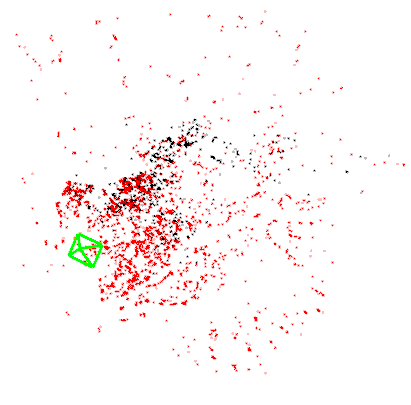
We propose a new general SLAM system that uses the semantic segmentation of objects and structures in the scene. Semantic information is relevant as it contains high level information which may make SLAM more accurate and robust. Our contribution is threefold: i) A new SLAM system based on ORB-SLAM2 that creates a semantic map made of clusters of points corresponding to objects instances and structures in the scene. ii) A modification of the classical Bundle Adjustment formulation to constrain each cluster using geometrical priors, which improves both camera localization and reconstruction and enables a better understanding of the scene. iii) A new Bundle Adjustment formulation at the level of clusters to improve the convergence of classical Bundle Adjustment. We evaluate our approach on several sequences from a public dataset and show that, with respect to ORB-SLAM2 it improves camera pose estimation.
翻译:我们建议采用现场物体和结构的语义分解系统,语义信息是相关的,因为它包含高层次信息,可能使SLAM更加准确和有力,我们的贡献有三重:(1) 以ORB-SLAM2为基础的新的SLAM系统,根据现场物体和结构的特征组别绘制出一个语义图。(2) 修改传统的捆绑调整公式,使用几何前线限制每个组别,既改进相机的定位和重建,又使人们更好地了解现场。(3) 在集群一级制定新的捆绑调整公式,以改善古典捆绑调整的趋同。我们评估了公共数据集的若干序列,并表明,关于ORB-SLAM2,它改进了摄像机的估计。