【泡泡一分钟】使用无参数统计和聚类实现SLAM中识别物体的定位
每天一分钟,带你读遍机器人顶级会议文章
标题:Localization of Classified Objects in SLAM using Nonparametric Statistics and Clustering
作者:Asif Iqbal and Nicholas R. Gans
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
编译:明煜航
审核:陈世浪,颜青松
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

传统的同时定位与建图(SLAM)在点、线、面的基础上建立地图。这些地图所构建的视觉环境没有包含任何语义或者物体信息。近年来机器学习的发展让目标检测达到了极高的正确率,并且能够检测出很多物体。目标检测能够有效的帮助SLAM在建图过程中融入语义信息。
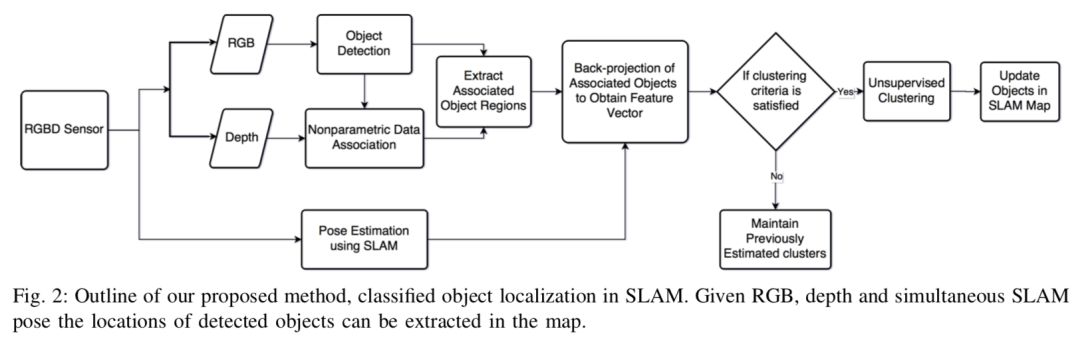
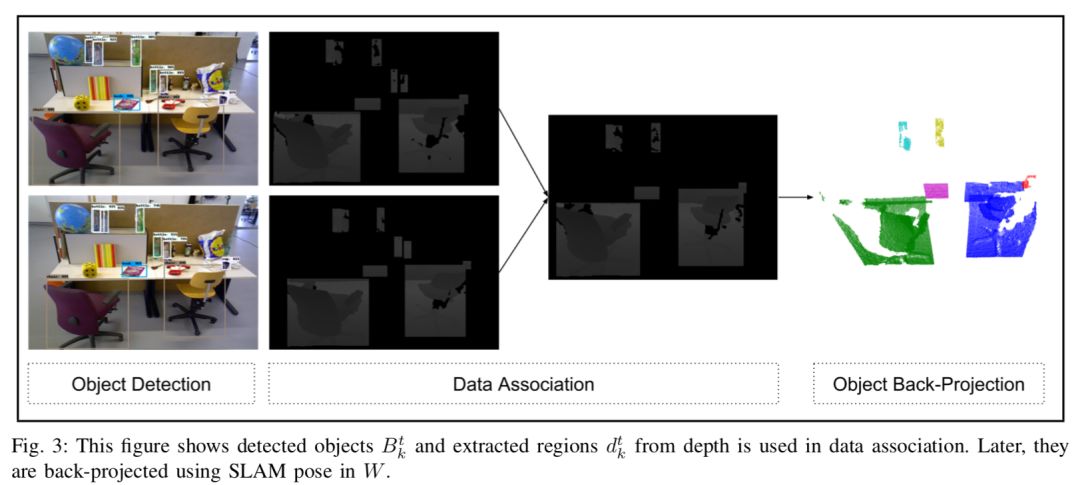
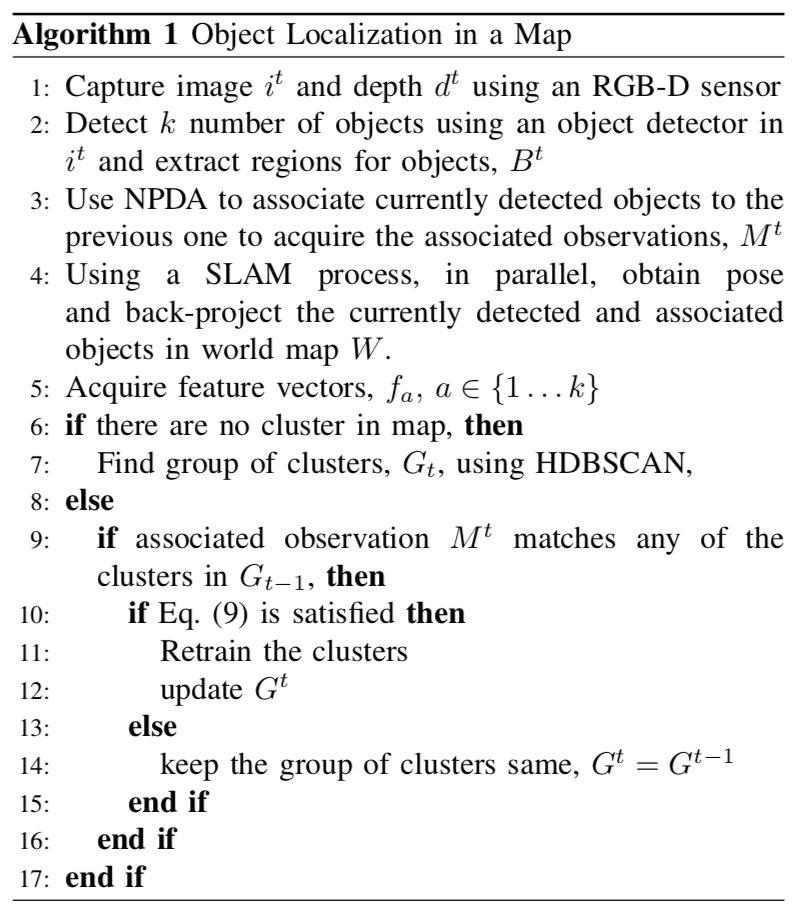
在这过程中,一个主要的困难在于对一段时间内检测到的物体的数据关联。作者展示了一种无参数的统计方法来解决连续帧中被检测到的物体的数据关联问题。随后作者使用了一种无监督聚类方法来识别物体是否存在于地图之中。整个这个线程可以与SLAM平行运行。
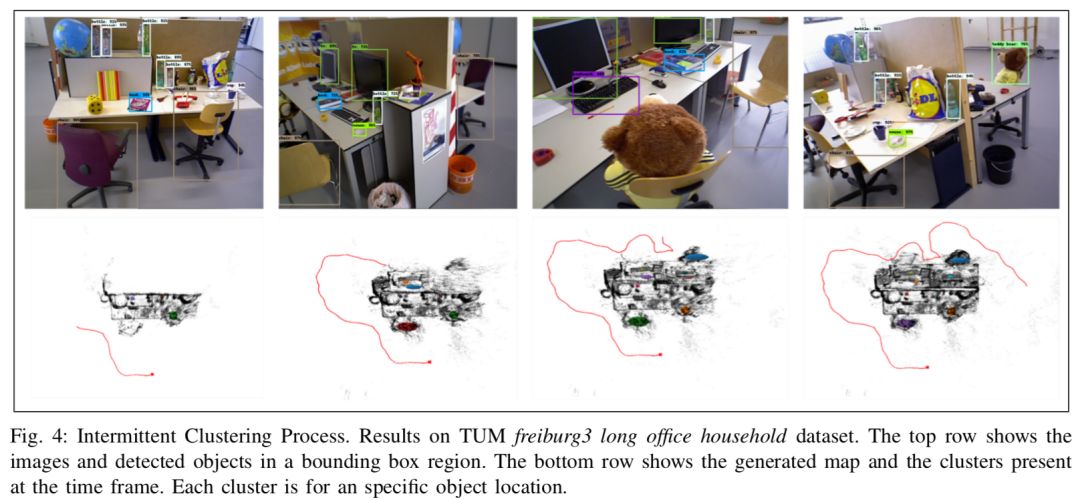
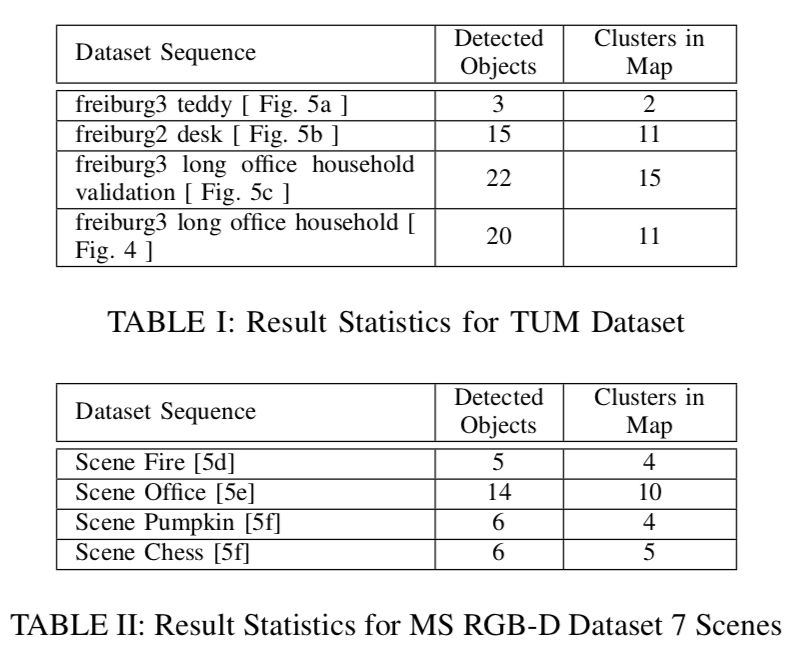
该算法的性能在几个公开数据集上进行了测试,其结果表明了这种在SLAM中定位物体的算法是非常有前景的。

Abstract
Traditional Simultaneous Localization and Mapping (SLAM) approaches build maps based on points, lines or planes. These maps visually resemble the environment but without any semantic or information about the objects in the environment. Recent advancements in machine learning have made object detection highly accurate and reliable with large set of objects. Object detection can effectively help SLAM to incorporate semantics in the mapping process. One of the main obstacles is data association between detected objects over time. We demonstrate a nonparametric statistical approach to solve the data association between detected objects over consecutive frames. Then we use an unsupervised clustering method to identify the existence of objects in the map. The complete process can be run in parallel with SLAM. The performance of our algorithm is demonstrated on several public datasets, which shows promising results in locating objects in SLAM.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



