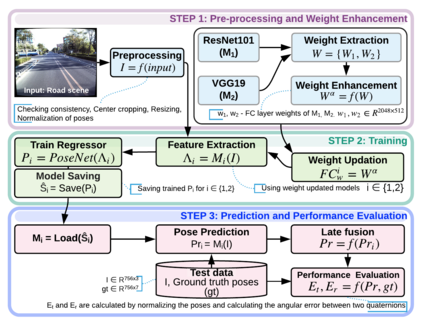
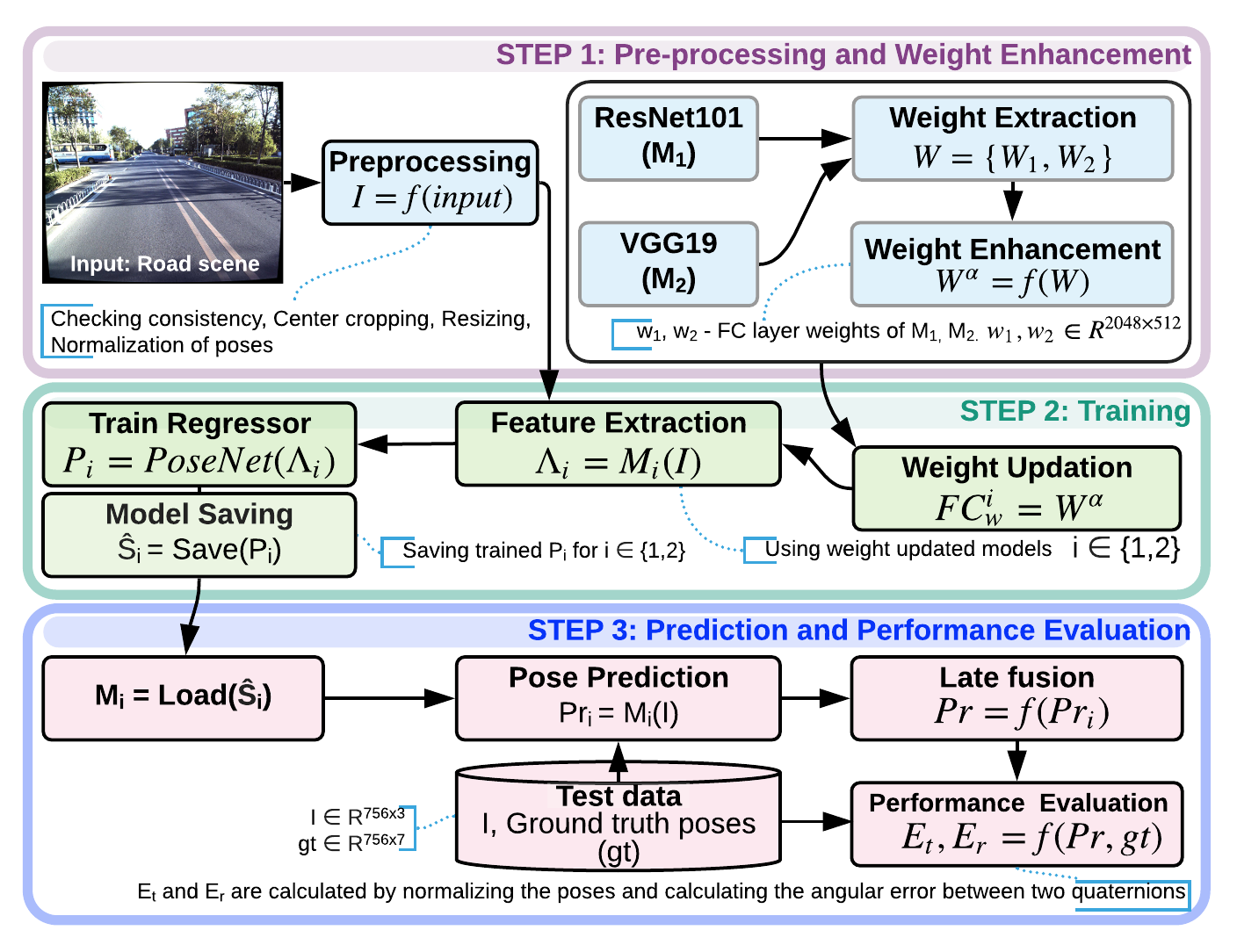
Simultaneous localization and mapping (SLAM) is used to predict the dynamic motion path of a moving platform based on the location coordinates and the precise mapping of the physical environment. SLAM has great potential in augmented reality (AR), autonomous vehicles, viz. self-driving cars, drones, Autonomous navigation robots (ANR). This work introduces a hybrid learning model that explores beyond feature fusion and conducts a multimodal weight sewing strategy towards improving the performance of a baseline SLAM algorithm. It carries out weight enhancement of the front end feature extractor of the SLAM via mutation of different deep networks' top layers. At the same time, the trajectory predictions from independently trained models are amalgamated to refine the location detail. Thus, the integration of the aforesaid early and late fusion techniques under a hybrid learning framework minimizes the translation and rotation errors of the SLAM model. This study exploits some well-known deep learning (DL) architectures, including ResNet18, ResNet34, ResNet50, ResNet101, VGG16, VGG19, and AlexNet for experimental analysis. An extensive experimental analysis proves that hybrid learner (HL) achieves significantly better results than the unimodal approaches and multimodal approaches with early or late fusion strategies. Hence, it is found that the Apolloscape dataset taken in this work has never been used in the literature under SLAM with fusion techniques, which makes this work unique and insightful.
翻译:以定位坐标和准确绘制物理环境地图为基础的移动平台(SLAM)用于预测定位坐标和物理环境精确绘图的移动平台动态运动路径。 SLAM在扩大现实(AR)、自主车辆、即自行驾驶汽车、无人驾驶飞机、自主导航机器人(ANR)方面潜力巨大。这项工作引入了一个混合学习模式,探索超越特性融合的范围之外,并采用多式联运加权缝纫战略,以改善SLAM基线算法的性能。它通过不同深层次网络顶层的突变,对SLAM前端特征提取器进行加权增强。与此同时,独立培训模型的轨迹预测被合并,以完善地点细节。因此,将上述早期和晚融合技术纳入混合学习框架,最大限度地减少了SLAM模型的翻译和轮换错误。这项研究利用一些众所周知的深层次学习(DL)架构,包括ResNet18、ResNet34、ResNet50、ResNet101、VGGG16、VGG19和AlexNet等用于实验性分析的前端特征。广泛实验性分析分析表明,在采用混合混合学习方法或阿勒穆勒穆勒斯(HL)工作中,其早期工作成果比其早期工作取得了更好的结果。