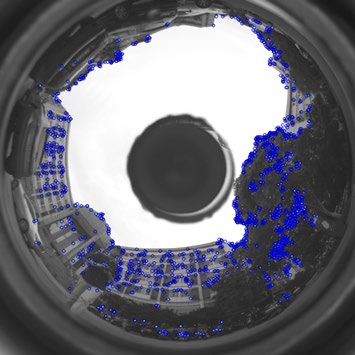
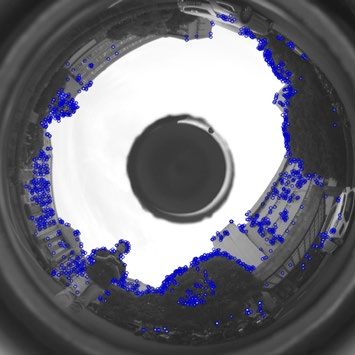
In this paper, we propose PA-SLAM, a monocular panoramic annular visual SLAM system with loop closure and global optimization. A hybrid point selection strategy is put forward in the tracking front-end, which ensures repeatability of keypoints and enables loop closure detection based on the bag-of-words approach. Every detected loop candidate is verified geometrically and the $Sim(3)$ relative pose constraint is estimated to perform pose graph optimization and global bundle adjustment in the back-end. A comprehensive set of experiments on real-world datasets demonstrates that the hybrid point selection strategy allows reliable loop closure detection, and the accumulated error and scale drift have been significantly reduced via global optimization, enabling PA-SLAM to reach state-of-the-art accuracy while maintaining high robustness and efficiency.
翻译:在本文中,我们提出PA-SLAM,这是一个具有环闭和全球优化的单方全景废弃视觉SLAM系统,在跟踪前端提出混合点选择战略,确保关键点的重复性,并能够根据一袋字的方法探测环闭。每个被检测到的环切候选人都经过几何校验,而美元(Sim(3))相对的制约因素估计会在后端进行成形图形优化和全球捆绑调整。关于真实世界数据集的一整套实验表明,混合点选择战略可以进行可靠的环闭检测,通过全球优化,累积的错误和规模漂移已经大大减少,使PA-SLAM能够达到最新准确度,同时保持高度稳健和效率。