【泡泡一分钟】用于边缘检测更丰富的卷积特征 (CVPR-32)
每天一分钟,带你读遍机器人顶级会议文章
标题:Richer Convolutional Features for Edge Detection
作者:Yun Liu, Ming-Ming Cheng, Xiaowei Hu, Kai Wang, Xiang Bai
来源:CVPR2017
播音员:四姑娘
编译:李仕杰
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

今天为大家带来的文章是——用于边缘检测更丰富的卷积特征,该文章发表于CVPR2017。
在这篇文章中,我们提出了一个准确的边缘检测网络。
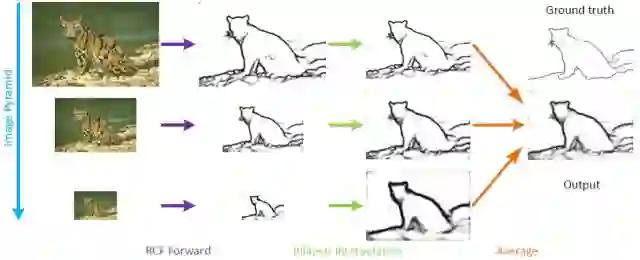

这个网络使用了丰富的卷积特征。由于在自然场景中的图片,物体出现在不同的尺度和比例,学习丰富的层次表示对于边缘检测 是至关重要的。CNN在这项任务中已经被验证是非常有效的方法。除此之外,在CNN中卷积特征随着感受野的增大而变得更加的粗糙。根据这些观测,在这一富有挑战性的任务中,我们试图采用更为丰富的卷积特征。提出的网络完全利用了物体的多尺度和多层信息,与此同时采用整体结合的方式利用了富有语义的卷积特征来预测图像到图像的边缘。

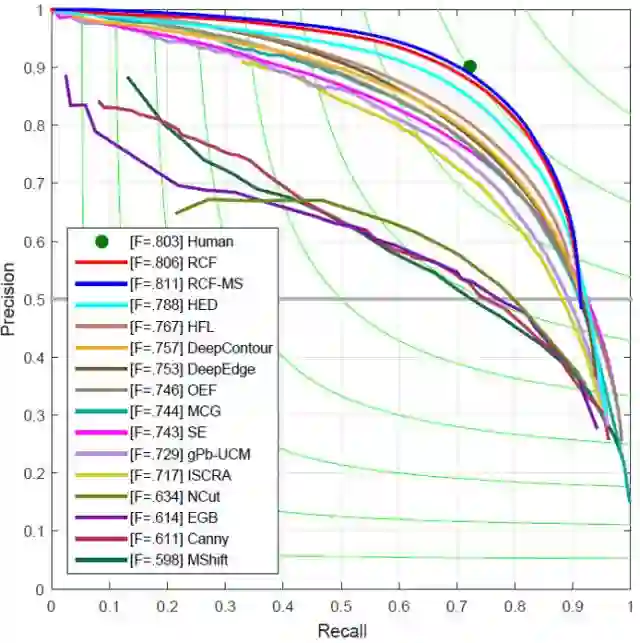
使用VGG16的网络,我们在一些数据集上达到了state-of-the-art的结果。在著名的BSDS500 benchmark上,我们达到了0.811的ODS F-measure并且保持了8FPS的速度。除此之外,我们快速版本的RCF能达到30FPS和0.806的ODS F-measure。
Abstract
In this paper, we propose an accurate edge detector using richer convolutional features (RCF). Since objects in natural images possess various scales and aspect ratios, learning the rich hierarchical representations is very critical for edge detection. CNNs have been proved to be effective for this task. In addition, the convolutional features in CNNs gradually become coarser with the increase of the receptive fields. According to these observations, we attempt to adopt richer convolutional features in such a challenging vision task. The proposed network fully exploits multiscale and multilevel information of objects to perform the image-to-image prediction by combining all the meaningful convolutional features in a holistic manner. Using VGG16 network, we achieve state-of-the-art performance on several available datasets. When evaluating on the well-known BSDS500 benchmark, we achieve ODS F-measure of 0.811 while retaining a fast speed (8 FPS). Besides, our fast version of RCF achieves ODS F-measure of 0.806 with 30 FPS.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


