【泡泡一分钟】语义直线检测与应用
每天一分钟,带你读遍机器人顶级会议文章
标题:Semantic Line Detection and Its Applications
作者:Jun-Tae Lee, Han-Ul Kim,Chul Lee,Chang-Su Kim
来源:International Conference on Computer Vision (ICCV 2017)
编译:颜青松
审核:陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

语义直线是一种能够展示图像布局的特殊直线,在图像分析和场景理解中具有重要作用,然而目前还没有十分可靠的语义直线提取方法。
在本文中,作者提出了一个基于卷积神经网络的多任务的语义直线提取方法,其中语义直线提取包括一个分类任务和一个回归任务。本文的流程如下:首先使用卷积和最大池化获取输入图像的多尺度特征图;然后利用线池化层(line pooling layer)从特征图中提取可能的直线;最后使用分类层来判断该直线是否是语义直线和使用回归层来优化该直线的位置。
实验结果证明本文的方法能够准确稳健的从图片中提取语义线,并且能够应用于水平估计、布局标准和图像简化等领域。
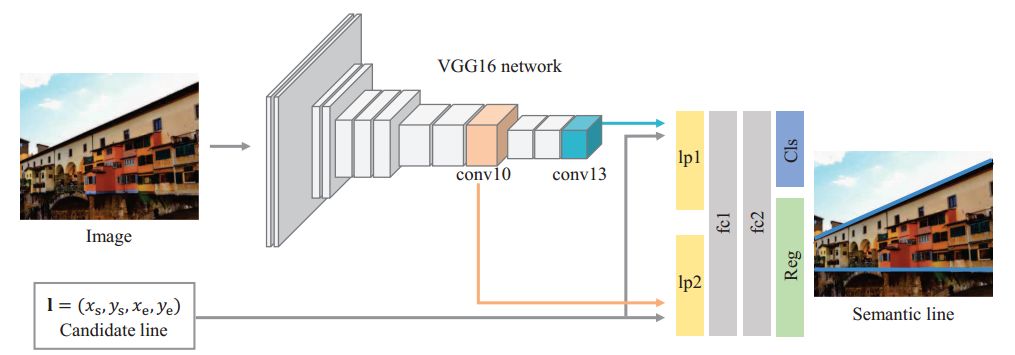
图1 本文算法的框架图
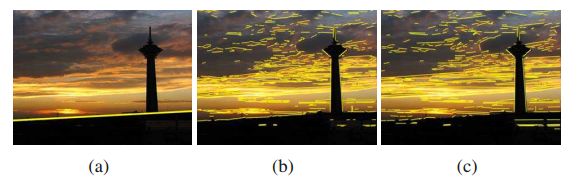
图2 语义直线与线段提取的区别,其中(a)展示的是语义直线,(b)和(c)分别展示的是使用LSD和EDLins提取的线段。
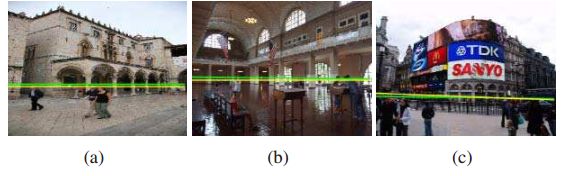
图3 水平线检测结果
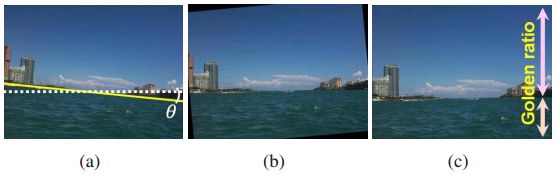
图4 基于水平线检测的布局调整,将图片中的水平线置平
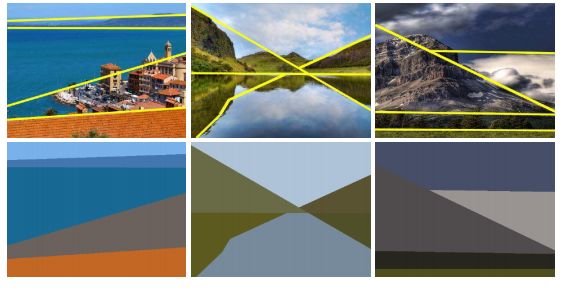
图5 基于语义直线的场景简化

Abstract
Semantic lines characterize the layout of an image. Despite their importance in image analysis and scene understanding, there is no reliable research for semantic line detection. In this paper, we propose a semantic line detector using a convolutional neural network with multi-task learning, by regarding the line detection as a combination of classification and regression tasks. We use convolution and max-pooling layers to obtain multi-scale feature maps for an input image. Then, we develop the line pooling layer to extract a feature vector for each candidate line from the feature maps. Next, we feed the feature vector into the parallel classification and regression layers. The classification layer decides whether the line candidate is semant ic or not. In case of a semantic line, the regression layer determines the offset for refining the line location. Experimental results show that the proposed detector extracts semantic lines accurately and reliably. Moreover, we demonstrate that the proposed detector can be used successfully in three applications: horizon estimation, composition enhancement, and image simplification.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



