【泡泡一分钟】基于姿态不变的特征嵌入及时空正则化的车辆重识别(ICCV2017-38)
每天一分钟,带你读遍机器人顶级会议文章
标题:Orientation Invariant Feature Embedding and Spatial Temporal Regularization for Vehicle Re-identification
作者:Zhongdao Wang, Luming Tang, Xihui Liu, Zhuliang Yao, etc.
来源:International Conference on Computer Vision (ICCV 2017)
播音员:糯米
编译:林旭滨 周平(40)
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

车辆重识别问题在城市监控上是一个重要的问题,并且在其它场景下也有重要的应用。本文旨在解决这一问题,在所提车辆重识别框架中,包括一种具有姿态不变性的特征嵌入模型和一种时空正则化模型。对于具有姿态不变性的特征嵌入,首先会基于20种关键点(图1)位置提取不同位姿的局部区域特征,随后将特征对齐、结合。
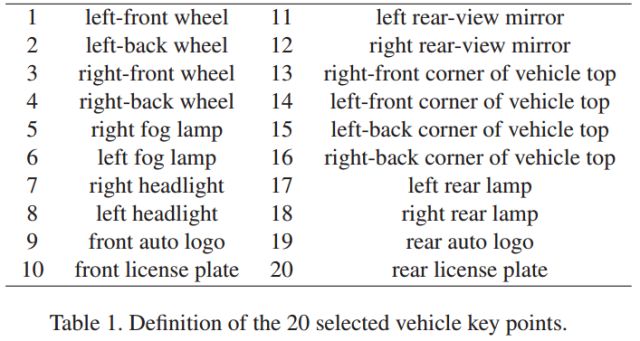
图1. 所选的20种车辆关键点
而对于时空正则化,我们采用了对数正态分布对时间—空间约束进行建模(注:即预测不同摄像机在不同时间下捕获到的车辆姿态),用以改善查询结果,如图2所示。
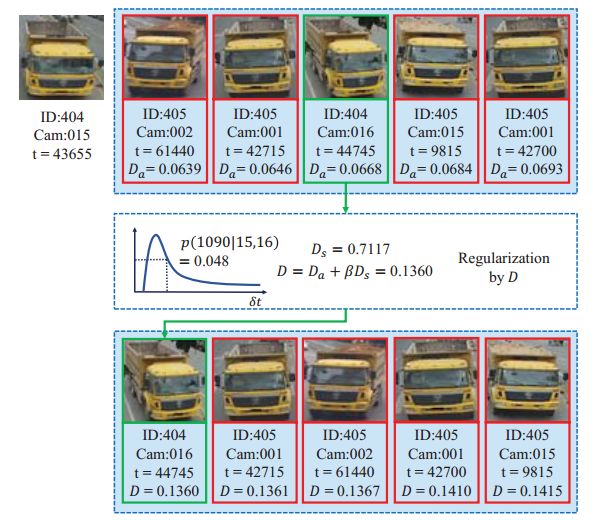
图2. 左图是输入图片,上面五张依次是查询结果,绿色框所示的查询真值在结果中排第三。加入了时空正则化之后可以回查询结果进行改善,如下排所示排名第一的是真值。
我们在公共的车辆重识别数据集上测试了我们的方法,实验结果显示我们的方法在目前同类型工作中取得了最佳的效果。我们对于所提框架进行了进一步的优化分析,包括路标回归器的选取以及注意机制的比较,这让我们所提的姿态不变的特征嵌入及时刻正则化这两部分都取得了相当的提升。

Abstract
In this paper, we tackle the vehicle Re-identification (ReID) problem which is of great importance in urban surveillance and can be used for multiple applications. In our vehicle ReID framework, an orientation invariant feature embedding module and a spatial-temporal regularization module are proposed. With orientation invariant feature embedding, local region features of different orientations can be extracted based on 20 key point locations and can be well aligned and combined. With spatial-temporal regularization, the log-normal distribution is adopted to model the spatial-temporal constraints and the retrieval results can be refined. Experiments are conducted on public vehicle ReID datasets and our proposed method achieves state-of-the-art performance. Investigations of the proposed framework is conducted, including the landmark regressor and comparisons with attention mechanism. Both the orientation invariant feature embedding and the spatio-temporal regularization achieve considerable improvements.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


