【泡泡图灵智库】HSfM: 混合运动恢复结构(CVPR)
泡泡图灵智库,带你精读机器人顶级会议文章
标题:HSfM: Hybrid Structure-from-Motion
作者:Hainan Cui Xiang Gao Shuhan Shen and Zhanyi Hu
来源:CVPR 2017
编译:焦阳
审核:张晶
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——HSfM:混合运动恢复结构CVPR 2017。
运动恢复结构(SFM)根据估计初始相机位姿方式的不同,大致可分为增量式和全局式两种。尽管增量式系统在鲁棒性和准确性上已经取得进步,但是运行效率仍然是它的主要挑战。为了解决效率问题,全局式重建系统同时估计来自对极几何图像的所有相机位姿,但是这种方式通常对外点敏感。本文提出了一种新的混合SfM方法,以在统一框架中解决效率、准确性和鲁棒的问题。具体的讲,首先本文提出一种“基于社区的自适应旋转误差平均”的方法全局估计相机的绝对旋转姿态。然后基于上面估计的相机绝对旋转姿态,以增量的方式计算相机光心的位置。大量的实验表明本文提出的混合式运动恢复结构,在计算效率方面与许多最先进的全局式SFM相近甚至更好,在重建精度和鲁棒性上与两种另外的增量式SFM相似。
主要贡献
1、本文提出了一种新的混合SfM方法,以在统一框架中解决效率、准确性和鲁棒的问题。
2、 用全局的方式提出一种基于社区的旋转误差平均法,该方法既考虑了对极几何的精度又考虑了成对几何的精度。
3 、基于已经估计的相机的绝对旋转姿态,用一种增量的方式估计相机光心位置。对每个添加的相机,其旋转和内参保持不变,同时使用改进的BA细化光心和场景结构。
算法流程

图1混合SFM系统流程
混合SFM系统输入对极几何图,首先全局估计绝对旋转姿态,然后以增量的方式估计相机光心位置,最后BA捆绑调整。
1、分解对极几何图的每一条边的本质矩阵,绝对旋转姿态Ri和光心位置Ci满足如下关系:
2、对于无序图片,相机通常分布不均,全局旋转平均的精度对对极几何的结构和成对几何的精度很敏感,为解决该问题,提出一种基于复杂网络分析的自动分组法将对极几何图分解成内部链接稠密外部链接稀疏的社区:

然后在每个社区内全局估计绝对旋转姿态。最后融合到一个统一的坐标系下。
3、基于绝对旋转姿态估计的结果,利用匹配点夹角选择初始匹配对,进行三角化。每增加一个视角,光心和空间点满足如下关系:
利用至少两个空间点可以确定光心位置,再采用RANSAC剔除外点。
4、在一些新相机加入SfM系统之后,对所有具有相同或多于2个标定相机的迹,采用RANSAC的策略三角化,最后BA捆绑优化,重新三角化以减少累积误差。

主要结果
对于有序图集,用本文提出的混合SFM在消除累计误差和抗外点干扰方面都有良好的表现,如图2。
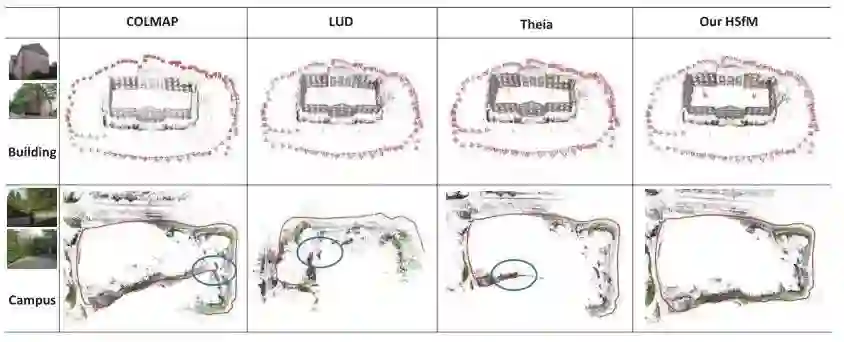
图2 Building和Campus有序图集重建结果
对于无序图集,用本文提出“社区旋转误差平均”的方法,克服全局图像分布不均的问题,同时采用RANSAC的策略估计光心位置,有效克服外点的干扰,如图3。表1表示本文的方法在大多数情况下重建最多的相机,对外点鲁棒性更好,重建精度与这些高水平的方法相近甚至更好。表2表示本文的方法比增量式的方法效率更高与全局式SFM相近甚至更好。
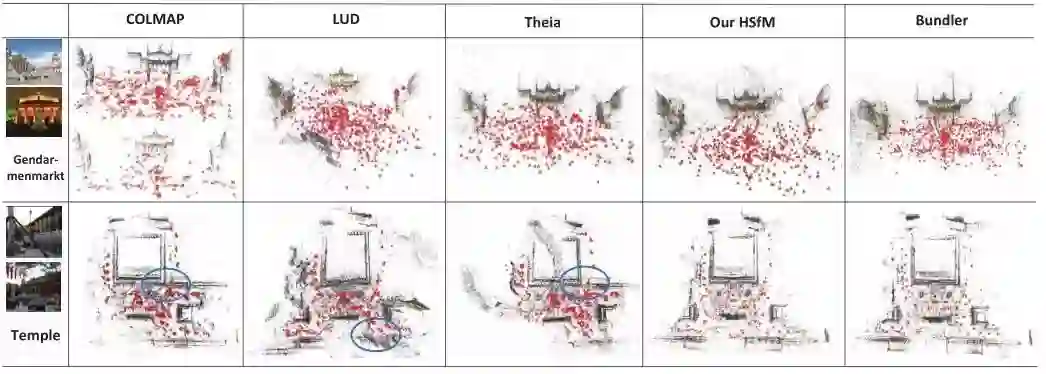
图3 Gendarmenmarkt 和 Temple无序图集重建结果
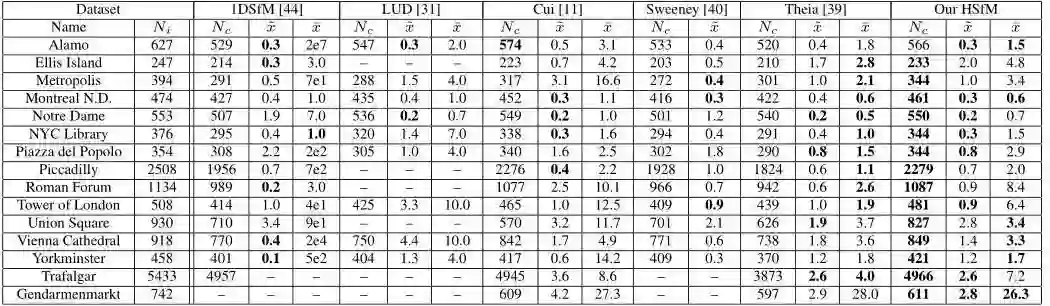
表1无序图重建结果对比,Ni对极几何图数量,Nc重建相机数量,x位置误差
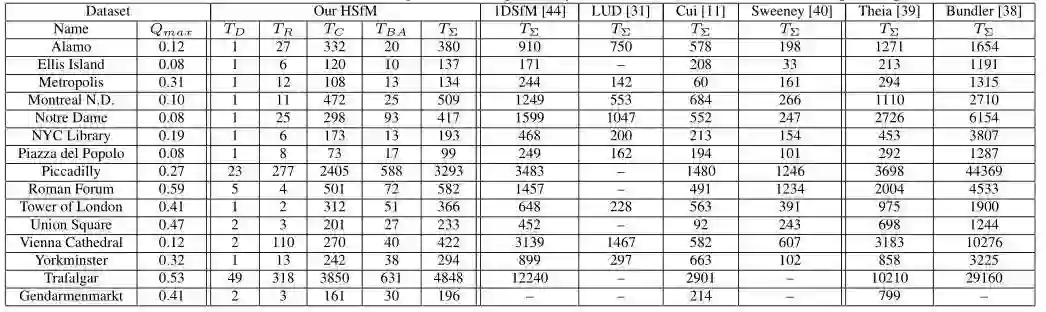
表2 无序图运行时间对比

Abstract
Structure-from-Motion (SfM) methods can be broadlycategorized as incremental or global according to their ways to estimate initial camera poses. While incremental system has advanced in robustness and accuracy, the efficiency remains its key challenge. To solve this problem,global reconstruction system simultaneously estimates all camera poses from the epipolar geometry graph, but it is usually sensitive to outliers. In this work, we propose a new hybrid SfM method to tackle the issues of efficiency, accuracy and robustness in a unified framework. More specifically, we propose an adaptive community-based rotation averaging method first to estimate camera rotations in a global manner. Then, based on these estimated camera rotations, camera centers are computed in an incremental way. Extensive experiments show that our hybrid method performs similarly or better than many of the state-of-the-art global SfM approaches, in terms of computational efficiency, while achieves similar reconstruction accuracy and robustness with two other state-of-the-art incremental SfM approaches.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



