【泡泡一分钟】一种用于城市规模雷达建图的健壮位姿图方法
泡泡图灵智库,带你精读机器人顶级会议文章
标题:A robust pose graph approach for city scale LiDAR mapping
作者:Sheng Yang, Xiaoling Zhu, Xing Nian, Lu Feng, Xiaozhi Qu and Teng Ma
来源:International Conference on Intelligent Robots and Systems (IROS), 2018
编译:孙钦
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——一种用于城市规模雷达建图的健壮位姿图方法,该文章发表于IROS 2018。
本文提出了一个用于在城市范围内重建全局一致性3D高清地图的方法。目前消除累计漂移的方法主要是基于扫描匹配因子约束下的位姿图优化。图中没有对齐的边对结果有不利的影响。为了解决这个问题并进一步处理由城镇环境中多任务数据获取引起的不一致性,我们引入了一个考虑系统初始化偏差的因子图的精细结构,其中扫描匹配因子通过新的分类器和稳健的优化策略进行两次验证。此外,我们结合多假设扩展卡尔曼滤波(MHEKF)来移除动态对象。定量实验结果表明,我们提出的方法在地图质量方面优于最先进的技术。
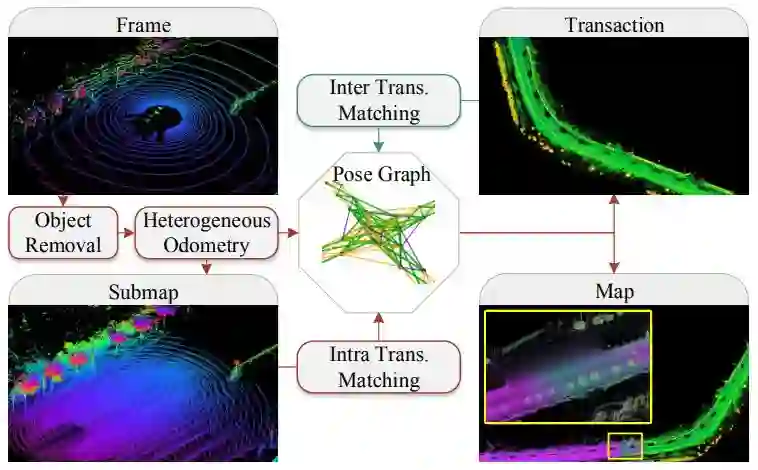
图1 我们系统的数据流,其中最终地图(来自单个transaction 和多个transaction )在里程计和配准的约束下进行了优化。红色模块可用于单次和多次采集,而绿色仅适用于多transaction 情况。
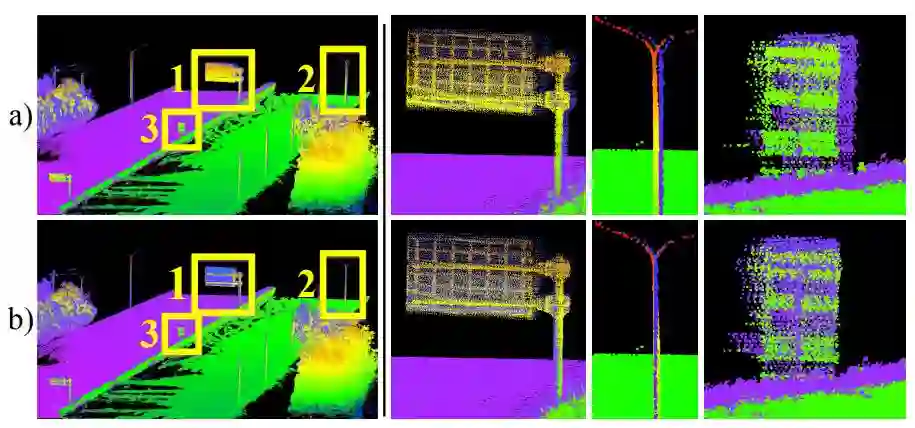
图2 有前端因子滤波和没有前端因子滤波构造的地图的详细视图。a)图,没有经过滤波,错误的边导致意想不到的优化;b)图,经过滤波后的结果。
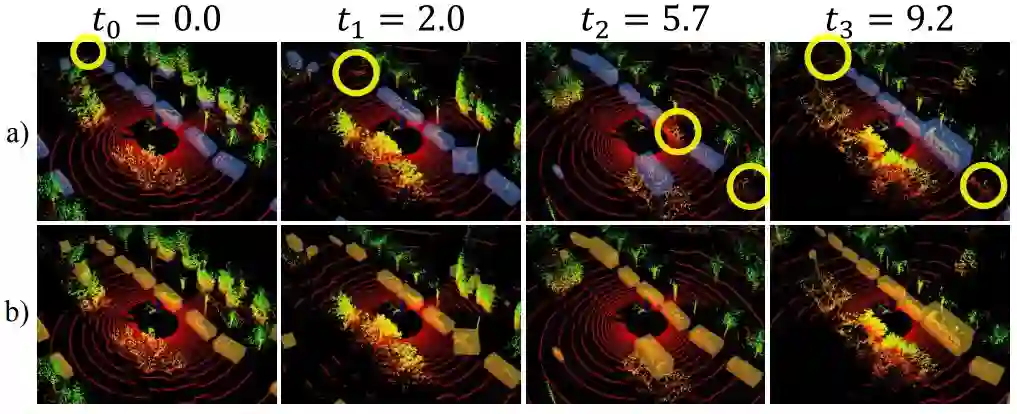
图 3 去除动态目标,上图包含4个有代表性的帧,说明了几辆车从出现到消失的跟踪过程。a)图,单帧检测算法,缺失的车辆如黄圈所示;b)图,通过MH-EKF增强检测算法。
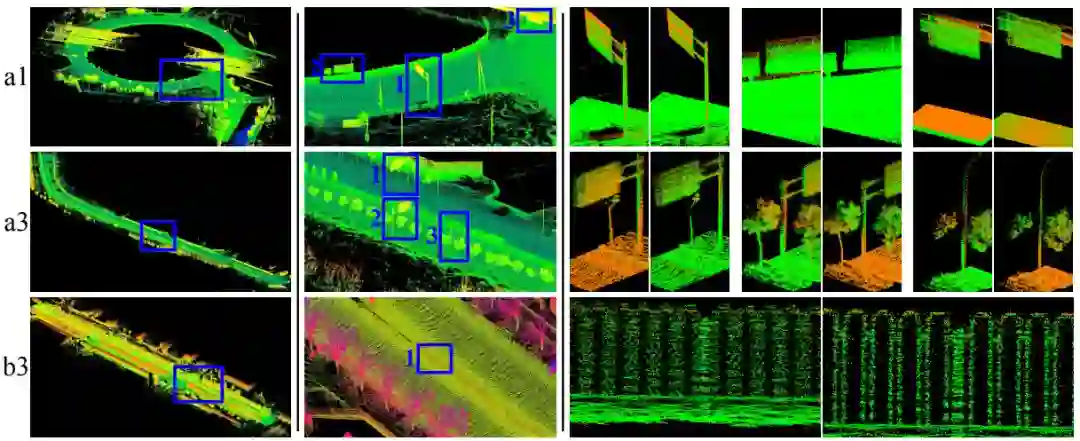
图4 建图系统的视觉效果

Abstract
This paper presents a method for reconstructing globally consistent 3D High-Definition (HD) maps at city scale. Current approaches for eliminating cumulative drift are mainly based on the pose graph optimization under the constraint of scan-matching factors. The misaligned edges in the graph may have negative impacts on the results. To address this problem and further handle inconsistency caused by multi-task acquisitions in urban environments, we introduce a refined structure of the factor graph considering systematical initialization bias, where the scan-matching factors are twice validated through a novel classifier and a robust optimization strategy. In addition, we incorporate a multi-hypothesis extended Kalman filter (MHEKF) to remove dynamic objects. Quantitative experimental results demonstrate that the proposed method outperforms state-of-the-art techniques in terms of map quality.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



