【泡泡一分钟】SlamBench2:视觉SLAM的多目标头对头基准测试
每天一分钟,带你读遍机器人顶级会议文章
标题:SLAMBench2: Multi-Objective Head-to-Head Benchmarking for Visual SLAM
作者:Bruno Bodin, Harry Wagstaff, Sajad Saeedi etc.
来源:The International Conference in Robotics and Automation(ICRA) 2018
编译:张建
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

SLAM正在成为机器人和增强现实(AR)系统的关键组成部分。虽然大量的SLAM算法被提出,但是很少的努力花在统一这些算法的接口,或者对它们的能力进行整体比较上。这是一个问题,因为不同的SLAM应用程序可以有不同的功能和非功能需求。例如,基于手机的AR应用程序有着很紧的能耗预算,而无人机导航系统通常需要很高的精度。SlamBench2是一个基准框架,用于评估现有和未来的SLAM系统,包括开放源代码和封闭源代码,以及可扩展的数据集列表,同时使用可比较且明确指定的性能指标列表。支持现有的各种SLAM算法和数据集,例如ElasticFusion、InfiniTAM、ORB-SLAM2、OKVIS,并且整合新的算法和数据集是由框架直接而明确地指定的。SlamBench2是一个公开可用的软件框架,它代表了定量、可比较和可验证的实验研究的起点,以研究跨SLAM系统的权衡。
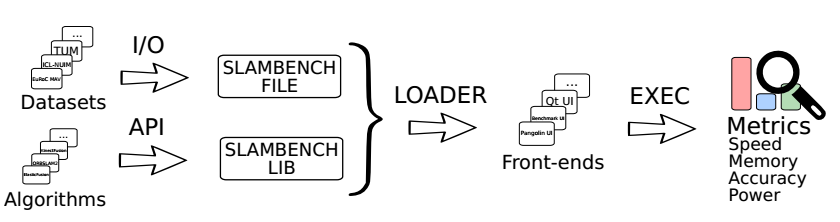
图1 SlamBench2结构概述。此图显示了框架的四个主要组件(I/O、API、加载器和用户界面)及其三个主要特性(不区分数据集、即插即用算法和模块化用户界面)。
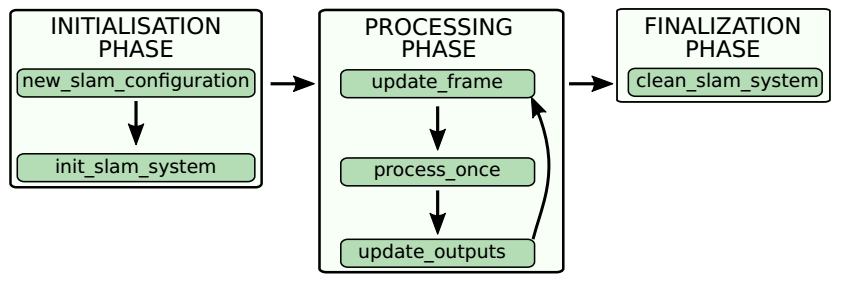
图2 SlamBench API的工作流。
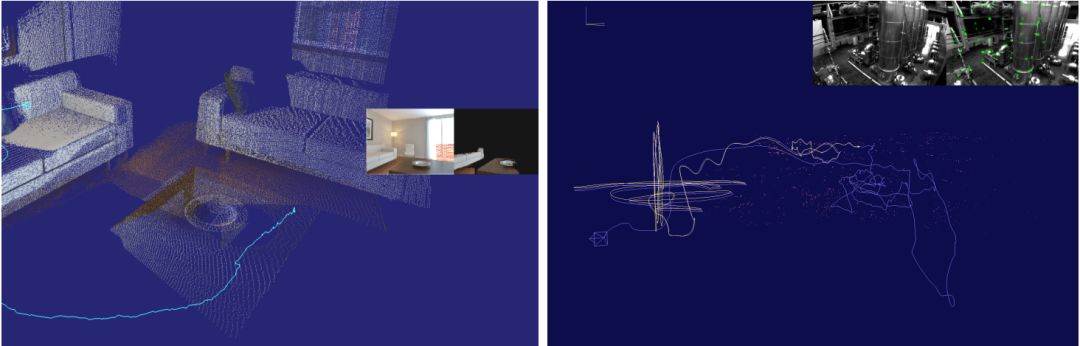
图3 使用Pangolin库的SlamBench2的GUI截图。在左侧,沿着轨迹显示了从ElasticFusion中提取的点云。还显示了ElasticFusion的输入帧和内部3D渲染,嵌入在图像的右侧。右边是一个类似的接口,用于ORBSLAM2和EuRoC MAV数据集。这一次地图是稀疏的,我们可以看到轨迹与地面真值相一致。
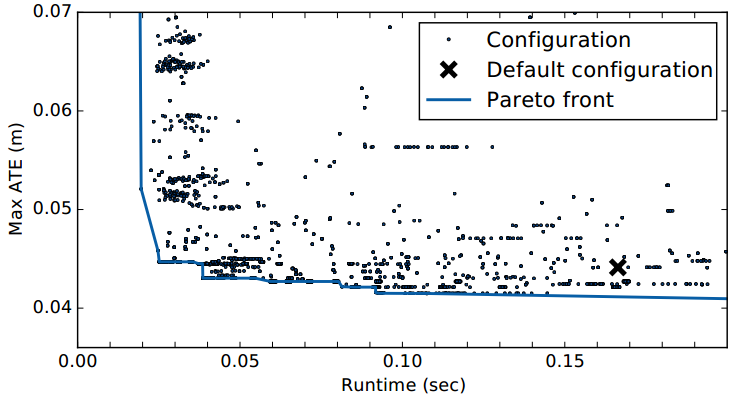
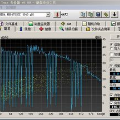
图4 在ODROID板上为Kinect Fusion(OpenCL)执行的精度/速度权衡探索。

Abstract
SLAM is becoming a key component of robotics and augmented reality (AR) systems. While a large number of SLAM algorithms have been presented, there has been little effort to unify the interface of such algorithms, or to perform a holistic comparison of their capabilities. This is a problem since different SLAM applications can have different functional and non-functional requirements. For example, a mobile phone-based AR application has a tight energy budget, while a UAV navigation system usually requires high accuracy. SLAMBench2 is a benchmarking framework to evaluate existing and future SLAM systems, both open and close source, over an extensible list of datasets, while using a comparable and clearly specified list of performance metrics. A wide variety of existing SLAM algorithms and datasets is supported, e.g. ElasticFusion, InfiniTAM, ORB-SLAM2, OKVIS, and integrating new ones is straightforward and clearly specified by the framework. SLAMBench2 is a publicly-available software framework which represents a starting point for quantitative, comparable and validatable experimental research to investigate trade-offs across SLAM systems.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com