【泡泡图灵智库】用于分类变形建筑构件点云的采样点网络(ICRA)
泡泡图灵智库,带你精读机器人顶级会议文章
标题:Sampled-Point Network for Classification of Deformed Building Element Point Clouds
作者:Yinda Zhang,Ravi Garg, Chamara Saroj Weerasekera
来源:ICRA2018
播音员:四姑娘
编译:张国强
审核:刘彤宇
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——用于分类变形建筑构件点云的采样点网络,该文章发表于ICRA 2018。
在灾后城市地区运行的搜索救援(SAR)机器人需要准确识别物理站点信息,以执行导航,绘图和操作任务。这可以通过获取环境的3D点云并从点云数据执行对象识别来实现。但是,在灾难救援行动期间遇到的非结构化环境和可能变形的对象使这项任务变得复杂。当前的3D对象识别方法依赖于在合适条件下获取的点云输入,并且不考虑诸如离群噪声,弯曲和截断的变形。这项工作为变形建筑元素的点云引入了3D类识别的深度学习架构。分类网络由堆叠卷积和直接应用于点坐标的平均池层组成,使用从网格模型数据库中采样的点云进行训练。所提出的方法使用点排序,重采样和旋转归一化技术实现输入变异性的鲁棒性。综合变形目标数据集的实验结果表明,该方法在分类精度和计算效率方面优于传统的深度学习方法。
本文工作的目标是实现一种深度学习架构,能够对变形的建筑元素点云进行快速准确的3D类识别。
主要贡献有:
1、算法对刚体和非刚体都有很好的鲁棒性。
2 、能够推广到不同的对象类。
3 、算法简洁,具有实时计算速度。
算法流程
本研究中使用的体系结构设计受PointNet的启发,但卷积层的使用和额外的预处理步骤不同
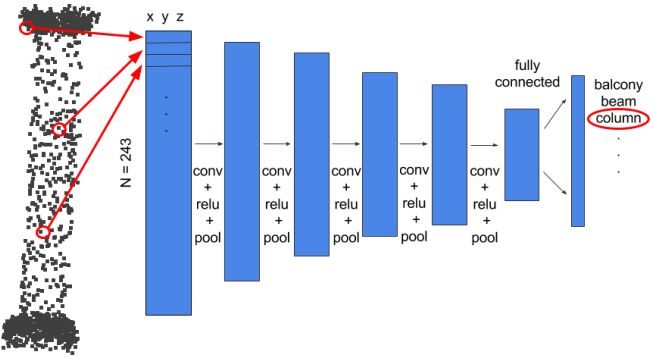
图1 结构设计
输入点云首先被转换为二维阵列,其表示采样密度网格(SDG)。在最后一个池化层之后,输入张量被重新整形为一维特征向量。 然后根据对象类的数量将其传递到10或40长度的完全连接的预测层。
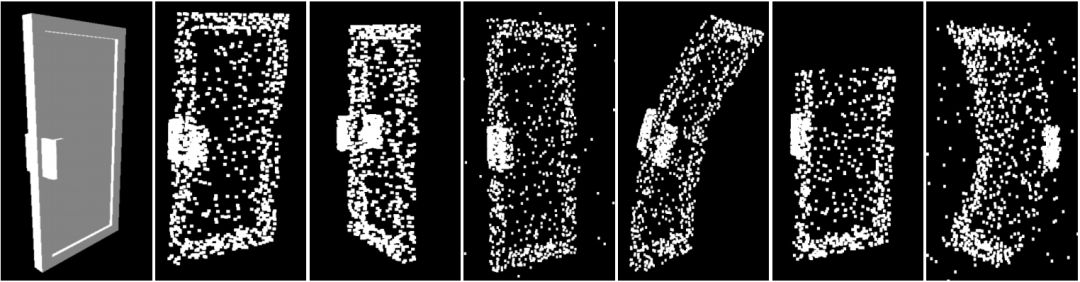
图2 门的合成变形
从左到右:(i)网格模型(ii)点云(iii)旋转(iv)扭曲扭曲(v)弯曲(vi)截断(vii)组合变形
表1 ModelNET40和BIMNET10数据集的分类精度
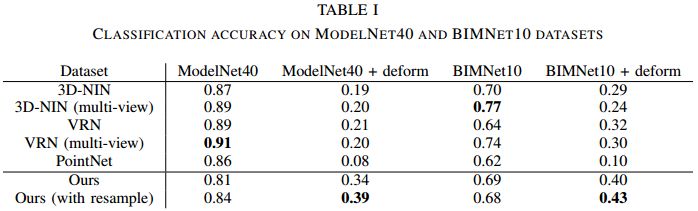
分类结果表明,基于体素网格的体系结构(3D-NIN和VRN)在非变形数据集上表现最佳,而采用重采样技术的建议体系结构在变形数据集上表现最佳。
表2 不同建筑之间的效率比较
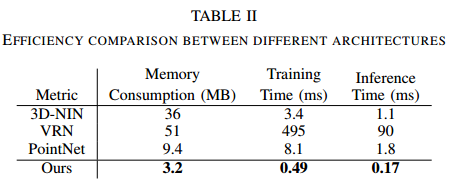
表2表明,所提出的方法能够匹配商用激光雷达(10-100Hz)的数据收集率并执行实时3D对象分类。
主要结果
所提出的架构涉及几个可以调整的超参数,例如卷积层的数量,每层的通道数和输入点的数量。以下实验试图比较不同超参数设置对分类性能的影响。
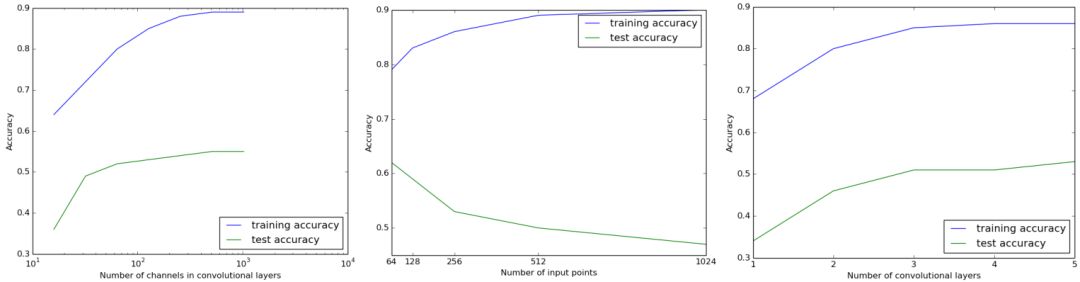
图3 不同建筑设计选择的准确性趋势
由图6可以看出,导致最佳性能的超参数的最终组合是243个输入点,256个特征通道和5个卷积层。 诸如使用不同优化技术或添加丢失层的各种其他修改不会显着改善分类性能。
表3 在MODELNET10识别任务中输入预处理的灵敏度
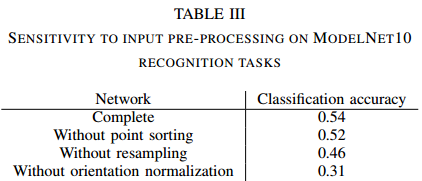
表3中的结果表明,每个预处理步骤对于在变形的对象数据集上实现高精度是必要的。
表4 ModelNET10识别中变形类型的敏感性
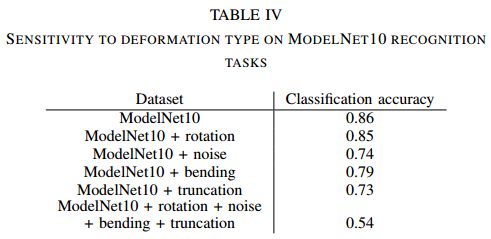
表4检查了各种变形类型的分类性能,例如旋转,噪声,弯曲和截断。
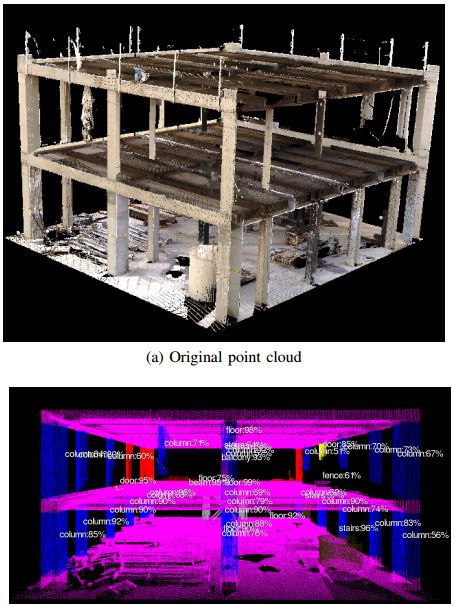
图4:3D识别由变形的建筑元素点云产生
实验结果显示了有保证的性能,其中训练的网络能够更好地概括不同的输入变形,例如旋转,异常值噪声,弯曲和截断。 这是通过在训练网络时应用更好的正则化技术(例如输入归一化和重采样)来实现的。

Abstract
Search-and-rescue (SAR) robots operating in postdisaster urban areas need to accurately identify physical site information to perform navigation, mapping and manipulation tasks. This can be achieved by acquiring a 3D point cloud of the environment and performing object recognition from the point cloud data. However, this task is complicated by the unstructured environments and potentially-deformed objects encountered during disaster relief operations. Current 3D object recognition methods rely on point cloud input acquired under suitable conditions and do not consider deformations such as outlier noise, bending and truncation. This work introduces a deep learning architecture for 3D class recognition from point clouds of deformed building elements. The classification network, consisting of stacked convolution and average pooling layers applied directly to point coordinates, was trained using point clouds sampled from a database of mesh models.The proposed method achieves robustness to input variability using point sorting, resampling, and rotation normalization techniques. Experimental results on synthetically-deformed object datasets show that the proposed method outperforms the conventional deep learning methods in terms of classification accuracy and computational efficiency.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



