【泡泡点云时空】PIXOR:基于点云的实时三维物体检测(CVPR2018-8)
泡泡点云时空,带你精读点云领域顶级会议文章
文章标题:PIXOR: Real-time 3D Object Detection from Point Clouds
作者:Bin Yang, Wenjie Luo, Raquel Urtasun
来源:IEEE Conference on Computer Vision and Pattern Recognition (CVPR),2018
编译:赵林
审核:郑英林
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文在自动驾驶的背景下,研究了基于点云的三维物体实时检测问题。因为物体检测是自动驾驶安全的必要组成部分,检测速度是至关重要的。但是由于点云数据的高维度,现有的检测方法计算量很大。我们通过从鸟瞰视图表示场景来更高效地利用3D数据,并提出了PIXOR,这是一种无建议的单级检测器,用于输出基于像素级神经网络预测的三维物体估计值。本文在输入的表示、网络结构和模型优化等方面进行了专门的设计,以达到高精度和实时性的平衡,并在Kitti Bev对象检测数据集和大规模3D车辆检测数据集ATG4D上验证了PIXOR,在这两个数据集上都表明本文所提出的检测器在平均精度(mAP)上都优于其他最先进的方法,同时运行速率达到了10FPS。
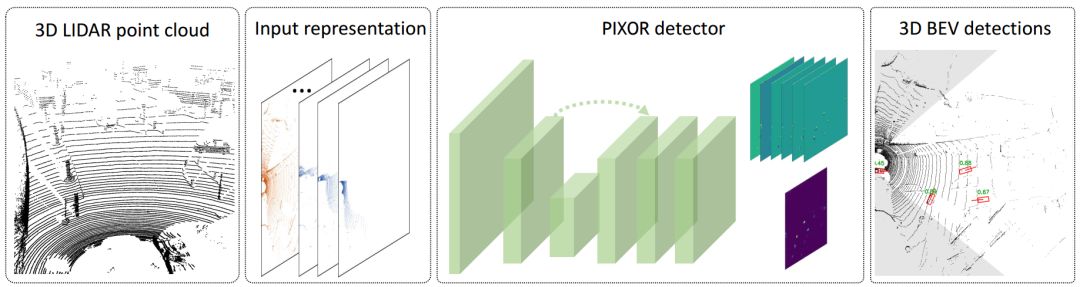
图1:基于激光雷达点云的鸟瞰图(BEV)三维物体检测器的概述
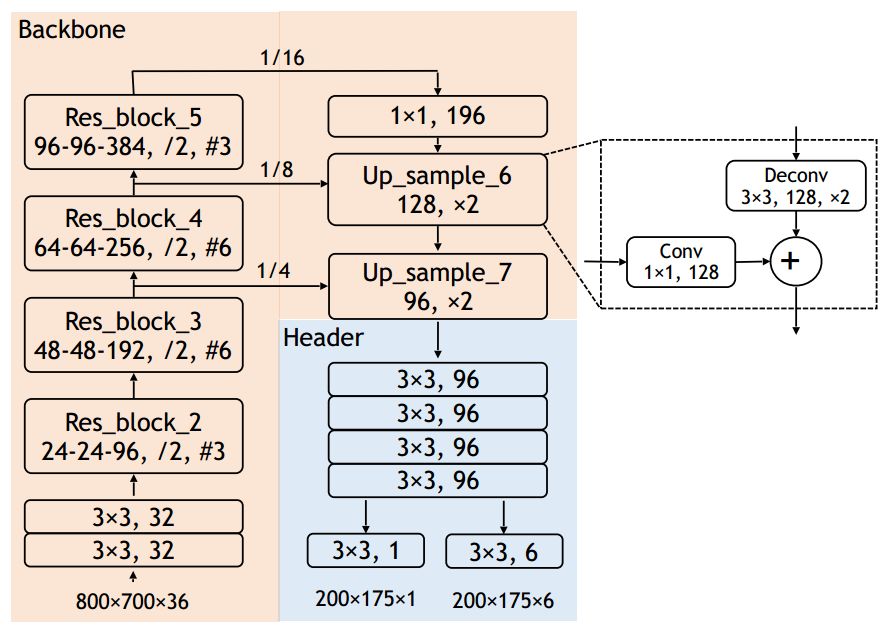
图2:PIXOR的网络结构
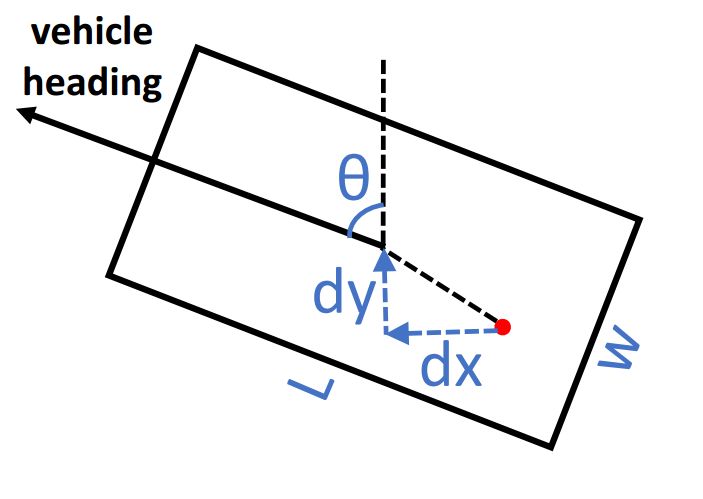
图3:一个正样本(红色像素点)的几何输出参数化。学习的目标参数为{cos(θ), sin(θ), log(dx), log(dy), log(w), log(l)},参数事先在训练集上规范化,具有零均值和单位方差。
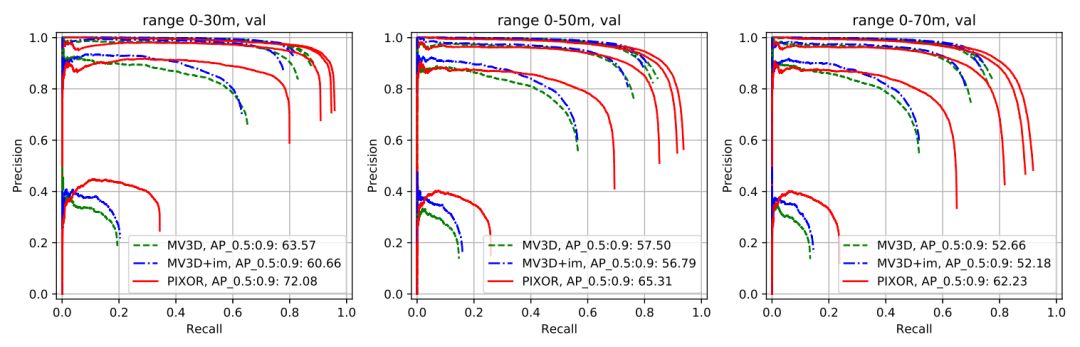
图4:在Kitti Val集上对PIXOR和MV3D进行评价,我们为每种方法绘制了5条精确召回曲线,对应于0.5~0.9之间的5个不同IOU阈值,并汇报平均AP(%),我们在三个不同的范围进行比较。
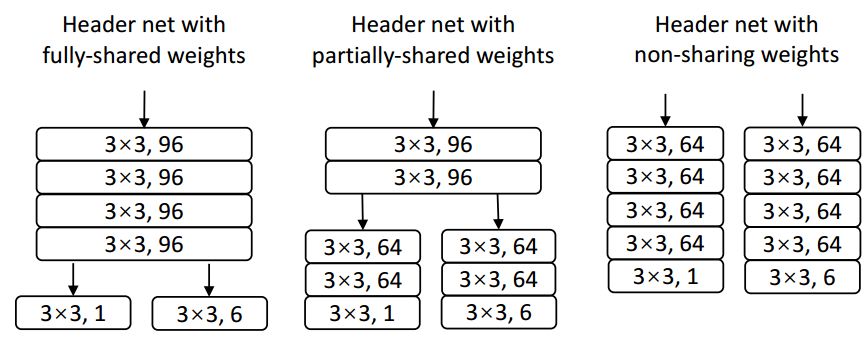
图5:头部网络体系结构的三种版本
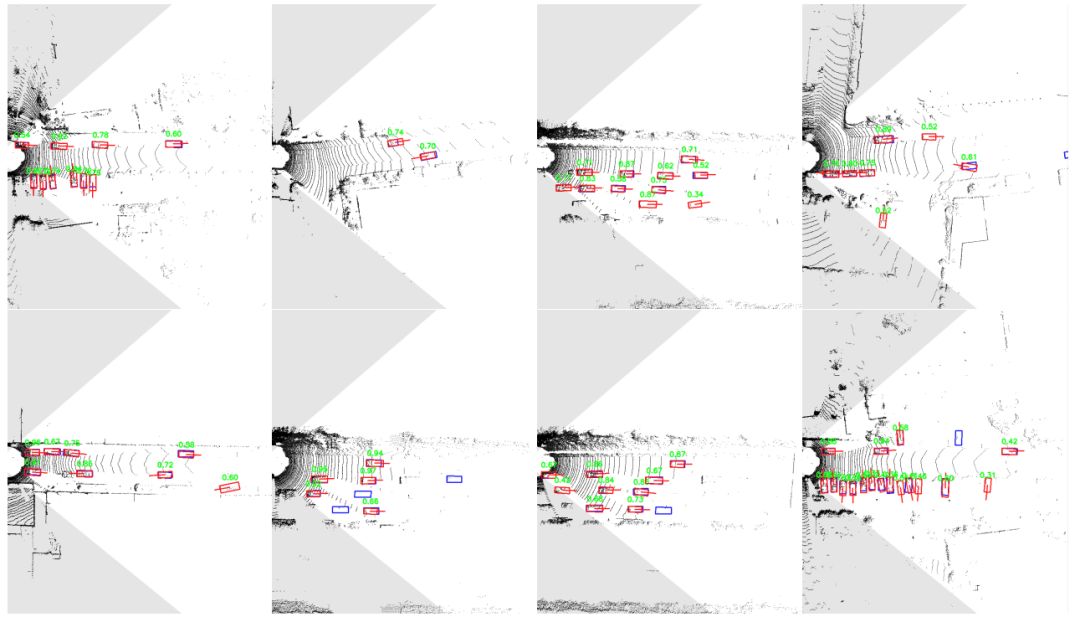
图6:PIXOR在Kitti物体val集上的实例检测结果。检测结果用红色标志,而正确的真实数据用蓝颜色标注。灰色区域超出了相机视野范围所以没有标签。

Abstract
We address the problem of real-time 3D object detection from point clouds in the context of autonomous driving. Speed is critical as detection is a necessary component for safety. Existing approaches are, however, expensive in computation due to high dimensionality of point clouds.We utilize the 3D data more efficiently by representing the scene from the Bird’s Eye View (BEV), and propose PIXOR,a proposal-free, single-stage detector that outputs oriented 3D object estimates decoded from pixel-wise neural network predictions. The input representation, network architecture, and model optimization are specially designed to balance high accuracy and real-time efficiency. We validate PIXOR on two datasets: the KITTI BEV object detection benchmark, and a large-scale 3D vehicle detection benchmark. In both datasets we show that the proposed detector surpasses other state-of-the-art methods notably in terms of Average Precision (AP), while still runs at 10 FPS.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以点击阅读原文获得链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com


