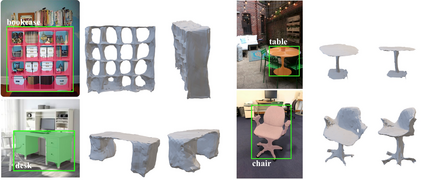
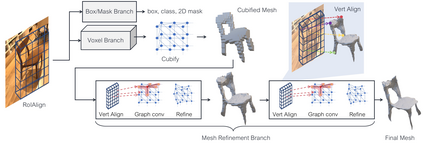
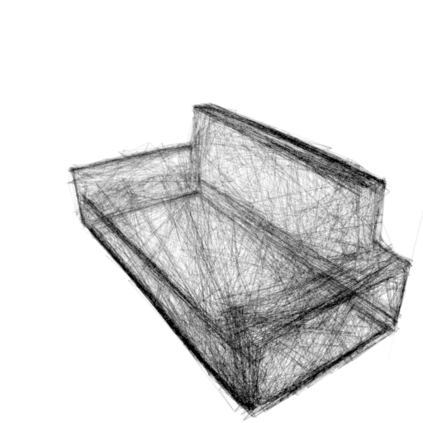
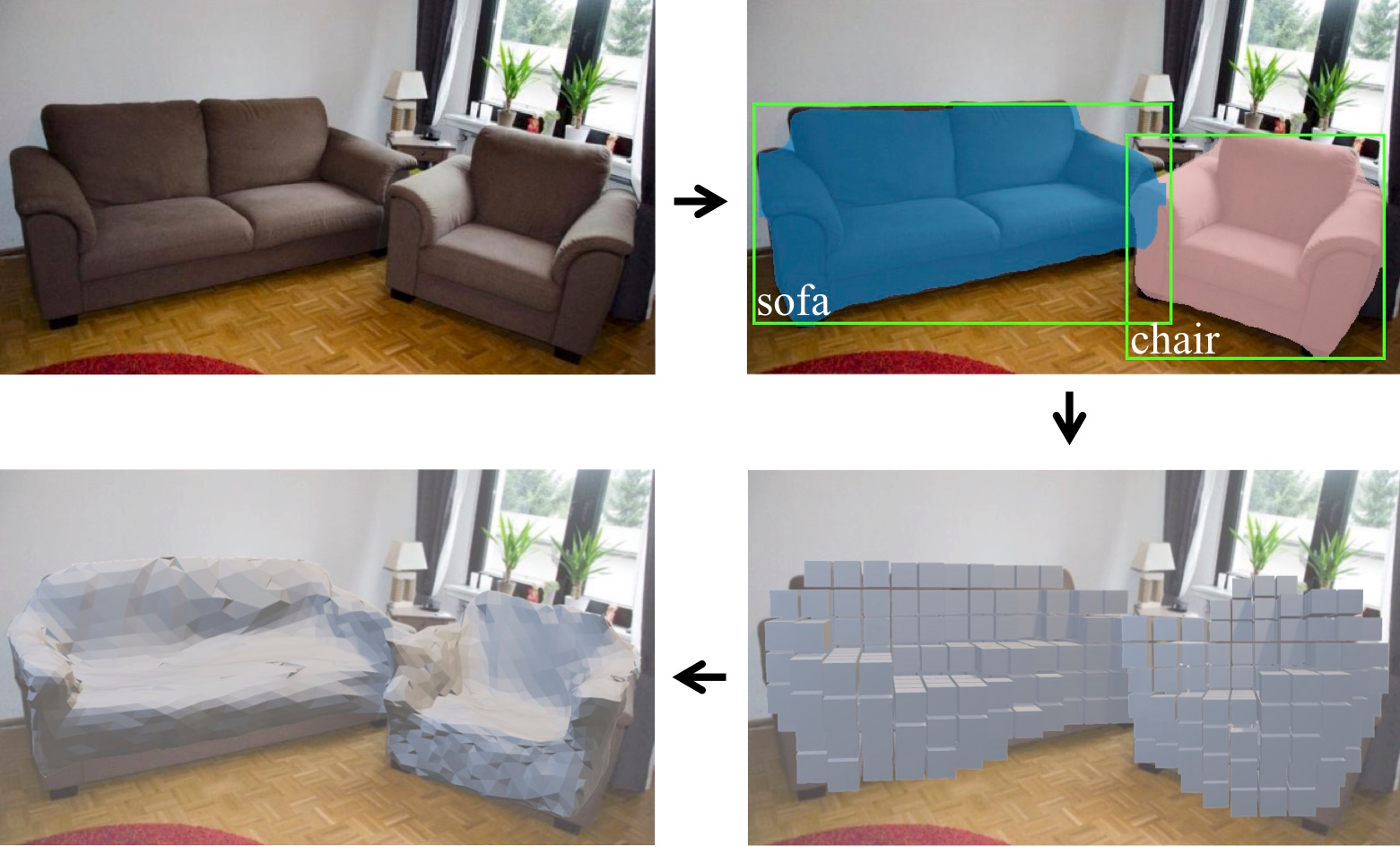
Rapid advances in 2D perception have led to systems that accurately detect objects in real-world images. However, these systems make predictions in 2D, ignoring the 3D structure of the world. Concurrently, advances in 3D shape prediction have mostly focused on synthetic benchmarks and isolated objects. We unify advances in these two areas. We propose a system that detects objects in real-world images and produces a triangle mesh giving the full 3D shape of each detected object. Our system, called Mesh R-CNN, augments Mask R-CNN with a mesh prediction branch that outputs meshes with varying topological structure by first predicting coarse voxel representations which are converted to meshes and refined with a graph convolution network operating over the mesh's vertices and edges. We validate our mesh prediction branch on ShapeNet, where we outperform prior work on single-image shape prediction. We then deploy our full Mesh R-CNN system on Pix3D, where we jointly detect objects and predict their 3D shapes.
翻译:2D 感知的快速进步导致了精确探测真实世界图像中天体的系统。 然而, 这些系统在 2D 中做出预测, 忽略了世界的 3D 结构。 同时, 3D 形状预测的进展主要侧重于合成基准和孤立对象。 我们统一了这两个领域的进步。 我们提议了一个系统, 在真实世界图像中检测天体, 并产生三角网格, 使每个被检测到的天体的完整 3D 形状。 我们的系统叫做 Mesh R- CNN, 以网状预测分支来增强Mesh R- CNN, 使Meshes 产生不同地形结构的螺旋体, 首先预测粗皮斯 形 表示为 meshe, 并用图象网络在网状和网状上进行精细化。 我们验证了在 ShapeNet 的网 的网形预测分支, 在那里我们比先前的单图像形状预测工作要快。 我们然后在 Pix3D 上部署我们的全 Mesh R- 系统, 我们共同检测对象和预测 3D 形状。